
基于相位灵敏度的远心条纹投影轮廓术条纹角度优化方法研究华南理工大学团队突破微尺度高精度测量技术瓶颈
在微机电系统(MEMS)、精密仪器制造及微型光学元件加工等领域,微物体的高精度三维形貌测量是保障产品性能一致性、提升制造工艺水平的关键技术环节。近数十年来,显微条纹投影轮廓术(MFPP)凭借非接触式测量、高数据采集效率及较宽测量范围等优势,已成为该领域主流测量技术之一。然而,传统MFPP系统常依赖立体光学显微镜或长工作距离镜头,这类光学组件普遍存在成像畸变、放大率随物距变化、景深有限等问题,难以满足当前微尺度测量对更高精度与稳定性的需求。
针对这一技术瓶颈,华南理工大学李海副教授团队聚焦远心条纹投影轮廓术(TFPP)这一新型测量技术,提出一种基于相位灵敏度的条纹角度优化方法,显著提升了TFPP的测量精度,为微尺度三维测量领域提供关键技术支撑。相关研究成果以《Phase Sensitivity Based Fringe Angle Optimizationin Telecentric Fringe Projection Profilometry》为题,发表于国际测量领域权威期刊,其理论推导与实验验证为TFPP技术的工程化应用奠定重要基础。

TFPP技术的优势与核心科学问题
TFPP技术的核心竞争力源于远心镜头的特殊光学设计:远心镜头的孔径光阑位于像方焦点处,仅允许平行于光轴的物方光线进入成像系统。这种设计带来两大关键优势:一是物体在工作距离范围内移动时,成像放大率始终保持恒定,且成像畸变趋近于零;二是远心镜头具备更大景深(如该团队实验中采用的远心镜头景深达±5.7mm),能有效覆盖微物体的三维形貌范围。
尽管TFPP在光学硬件层面具备天然优势,但要充分发挥其精度潜力,需解决核心科学问题相位灵敏度优化。在所有条纹投影轮廓术(FPP)相关技术中,“相位”是连接像素坐标与物体深度信息的核心桥梁:通过分析投影仪投射的条纹在物体表面形成的相位变化,可反推出物体的深度信息。而“相位灵敏度”指的是相位信号对物体表面深度变化的反应程度灵敏度越高,系统能捕捉到的微小深度差异就越精细,测量精度自然越高。
此前研究已证实,不改变系统硬件的前提下,优化投影条纹的方向可提升相位灵敏度,但这一策略在TFPP中面临独特挑战:传统FPP用针孔镜头,其“极线”(描述相机与投影仪坐标关联的特殊线条)会汇聚于一点,导致最优条纹方向随像素位置变化;而TFPP用远心镜头,其极线呈现相互平行的特性(可理解为“所有极线朝着同一个方向倾斜,永不相交”)。这一特性暗示:TFPP的最优条纹方向是固定的,只需确定一个“最优条纹角度”即可这成为团队突破技术瓶颈的核心切入点。
理论推导:最优条纹角度的核心逻辑
为找到这个“最优条纹角度”,团队从TFPP系统的基础原理出发,逐步梳理出“成像规律→极线特性→相位灵敏度→最优角度”的完整逻辑链,用通俗的语言可概括为三个关键步骤:
1.远心镜头的成像规律
远心镜头如何将物体“转化”为相机里的像素?简单来说,世界中的物体点(比如微零件的某个表面点),会先通过一套固定的几何变换(类似“坐标转换”,把物体在真实空间的位置换成相机能识别的位置),再通过仿射变换(可理解为“按比例缩放+平移”),最终对应到相机像平面的某个像素点。这个转换过程的参数的一旦系统校准完成就固定不变,为后续分析提供基础。
2.平行极线的关键特性
TFPP系统由相机和投影仪(都装远心镜头)组成,二者需协同工作才能计算深度。团队通过分析两者的成像参数,发现投影仪像平面上的所有极线不仅方向一致,倾斜程度也完全相同也就是说,这些极线是严格平行的。这一发现很重要:既然极线方向固定,那能最大化相位灵敏度的条纹方向,理应与极线形成某种固定关系。
3.最优条纹角度的确定
团队进一步分析:投影仪投射的条纹,其“相位变化方向”(可理解为条纹明暗交替的方向)与条纹角度相关;而相位灵敏度,本质是相位随物体深度变化的“反应速度”。通过分析两者的关联,团队发现:当条纹的相位变化方向与极线方向满足特定条件(即条纹方向与极线垂直)时,相位对深度变化的“反应速度”最快此时相位灵敏度达到最大值,对应的条纹角度就是“最优条纹角度”。
简单来说,只要让投影条纹的方向与TFPP系统中平行的极线垂直,就能让系统捕捉微小深度变化的能力最强,测量精度自然最高。
实验验证:最优条纹角度的精度提升效果
为验证这一方法的有效性,团队搭建了完整的TFPP实验系统,并通过“定量测标准块”和“定性测复杂零件”两种方式,对比垂直条纹、水平条纹与最优角度条纹的测量性能。
1.实验系统的核心配置
实验系统的关键设备包括:
相机:分辨率2048×2048像素,能清晰捕捉微物体细节;
投影仪:采用数字光处理(DLP)技术,可精准投射不同角度的条纹;
远心镜头:两台相同的远心镜头分别装在相机和投影仪上,确保成像无畸变、景深足够;
精密定位平台:能将被测物体固定在精确位置,减少测量误差。
2.定量评估:标准块测量误差显著降低
团队用两个高精度标准块堆叠在平台上,分别用三种条纹方向测量,通过“均方根误差(RMSE)”“标准差(STD)”(两者数值越小,测量越精准)和“高度差误差”评估精度。结果如下:
垂直条纹:误差最大,RMSE最高达0.22mm,高度差误差超过1.3mm;
水平条纹:误差明显降低,RMSE降至0.020.03mm,高度差误差约0.10.2mm;
最优角度条纹:误差最小,RMSE最低仅0.0145mm,高度差误差最小仅0.04mm相当于一根头发直径的1/20(头发直径约0.080.1mm),精度提升效果显著。
3.定性评估:复杂零件细节还原更清晰
针对表面有凹槽、凸起的小型机械零件,三种条纹的重建效果差异明显:
垂直/水平条纹:零件边缘模糊,凹槽底部的形貌难以准确还原;
最优角度条纹:不仅能清晰呈现零件的整体轮廓,还能精准捕捉凹槽深度、凸起高度等细微特征哪怕是毫米级的微小结构,也能清晰还原。
研究结论与技术意义
李海副教授团队的研究,在理论与实践层面均为微尺度测量技术带来突破:
理论上,首次明确了TFPP系统中“条纹方向极线相位灵敏度”的关联,证明了“与极线垂直的条纹角度最优”,填补了该领域的理论空白;
实践上,无需改动硬件,仅通过优化条纹角度就能大幅提升精度,为企业提供了低成本、易实施的精度提升方案。
这一技术可直接应用于MEMS器件检测(如手机传感器的微小结构测量)、精密模具制造(如微型零件的尺寸校准)、医疗器件加工(如微型导管的形貌检测)等领域。未来,随着远心镜头分辨率的提升,该技术有望向“纳米级测量”突破,进一步拓展微尺度测量的应用边界。
-

激光损伤阈值(LIDT)测试技术:ISO 21254标准解读与工程实践
高功率激光系统中的光学元件,承受着每平方厘米数焦耳至数千焦耳的能量密度。一片反射镜的膜层在若干次脉冲后出现针孔——系统功率被迫降级,甚至整机返修。激光诱导损伤阈值(LIDT)是决定光学元件"能承受多强的光而不坏"的核心参数。本文从损伤机理、ISO 21254标准测试方法和工程选型三个维度,系统介绍LIDT测试的技术体系。
2026-07-07
-

DUV vs EUV光刻物镜装调:两种技术路线的精度博弈
DUV 和 EUV,两代光刻技术的核心光学系统,分别在 193nm 和 13.5nm 波长下工作。它们的装调精度要求相差的不是百分比,而是数量级。更关键的是,它们的装调方法论本身就是两套完全不同的逻辑。
2026-07-07
-
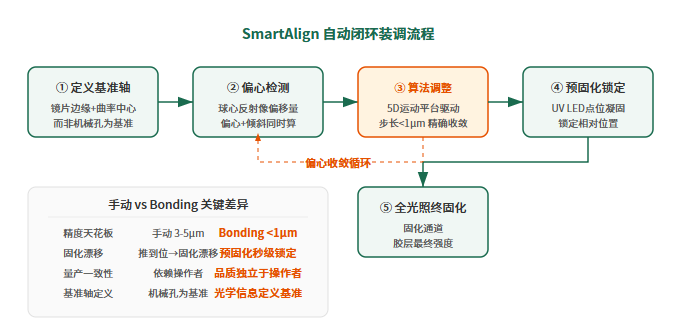
OptiCentric® Bonding 胶合装调系统,从"手感对准"到"算法锁定"
手动胶合时代,师傅的手感是精度上限——推到位靠经验,固化漂移靠运气,量产一致性靠祈祷。Bonding系统把这三件事交给算法:SmartAlign定义正确的轴、算法驱动精确的调整、梯度固化锁住精确的结果。
2026-07-07
-

精密光学检测实验室建设指南:从环境控制到设备布局的工程实践
一台精度λ/50的干涉仪放在一间没有温控的普通房间里,实测精度可能退化到λ/10以下。精密光学检测设备不是"买来就能用"的——它们的精度发挥严重依赖环境条件。本文从温度、湿度、振动、洁净度和设备布局五个维度,系统梳理精密光学检测实验室的建设要求和工程实践,为光学制造企业在规划检测实验室时提供可参考的技术框架。
2026-07-06
-

红外热像仪镜头选型指南:短焦、中焦与长焦的参数原理及场景适配
在红外热像仪的选型过程中,用户通常优先关注探测器分辨率参数,如384×288、640×512、1280×1024等指标。但在实际应用场景中,镜头焦距的适配性往往直接决定最终观测效果:同一台640×512分辨率的热像仪,搭配短焦镜头可实现大范围场景覆盖,但远距离小目标仅能占据少量像素;搭配长焦镜头可放大远处目标细节,但视场范围大幅收窄,搜索效率下降;中焦镜头虽兼顾二者特性,却未必适配所有特定场景。
2026-07-06







