
高精度轴对称非球面反射镜面形轮廓非接触式测量方法
非球面光学元件是高端光学系统的核心器件,其面形轮廓的高精度、可溯源测量是保障加工质量与系统性能的关键。本文针对轴对称非球面反射镜的测量需求,建立了通用化的非球面扫描轨迹数学模型,提出一种基于独立计量回路的非接触式坐标扫描测量方法。该方法采用运动与计量分离的框架结构,有效隔离运动误差对测量结果的影响;测头采用集成阵列式波片的四象限干涉测量系统,实现1nm级测量分辨率;通过扫描执行机构与多路激光干涉系统共基准设计,实现测量值可溯源至“米”定义。试验验证表明,该方法测量误差小于0.2μm,重复性精度达70nm,整体测量精度达到亚微米级,为非球面测量的量值统一与溯源提供了成熟的技术方案。
1、引言
非球面光学元件凭借简化系统结构、提升成像质量、降低系统重量等核心优势,已成为空间望远观测、航天遥感、激光核聚变、极紫外光刻等重大科技领域不可或缺的核心器件。随着高端光学领域的快速发展,复杂面形非球面元件的市场需求呈爆发式增长,高精度面形检测技术也成为制约非球面加工与应用的核心环节。
当前非球面面形测量领域仍存在显著行业痛点:一是全球范围内尚未形成非球面镜面形轮廓测量的统一标准与规范,量值统一性无法保障;二是面形测量仪器缺乏高等级标准器,测量结果难以完成计量溯源;三是国内现有测量设备普遍存在运动自由度受限、多轴运动误差叠加等问题,高端精密测量仪器高度依赖进口。
针对上述问题,本文提出一种高精度、可溯源的轴对称非球面反射镜轮廓测量方法,通过分离式计量架构、高精度干涉测头与共基准定位技术,实现亚微米级的测量精度,同时解决非球面测量的量值溯源难题。
2、非球面扫描测量轨迹数学模型
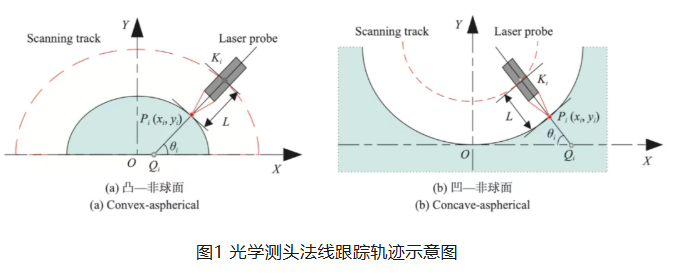
本方法采用坐标扫描测量技术,通过非接触式光学测头对非球面轮廓进行逐点扫描。扫描过程中,光学测头需始终沿非球面表面待测曲线的等距线移动,且测头光轴与待测点的法线方向保持重合,以此保证测量精度。
针对轴对称非球面的子午截面曲线,基于通用高次非球面曲线方程,推导得到任意待测点的法线方程、法线与光轴夹角,最终构建测头的运动轨迹模型:
对于凸非球面与凹非球面,可分别通过几何关系计算得到第一象限内的扫描轨迹点集;
测头空间位置仅与被测面形尺寸、法线方向相关,理论上当测头转动角度≥90°时,可适配所有连续性轴对称非球面的轮廓测量。
该模型具备强通用性,可覆盖各类常规轴对称非球面的扫描路径规划需求。

3、测量系统核心设计与工作原理
3.1分离式独立计量框架架构
传统三坐标扫描结构的运动轴误差、振动、环境形变等因素会直接耦合至测头,严重限制测量精度。本系统采用运动回路与计量回路完全独立的分离式计量框架,从架构层面消除运动误差影响:
运动框架仅承担跟踪扫描模块的驱动功能,配合工件台回转运动完成全轮廓扫描;
计量框架为独立无负载结构,仅承载干涉定位系统的参考基准,不参与任何运动执行,可完全避免运动形变、振动、热漂移等误差对计量回路的干扰;
计量回路采用激光干涉仪测量系统,实时获取扫描模块的位移信息,最大程度满足阿贝原则,保障测头运动轨迹的准确性。
3.2集成阵列波片的四象限干涉测头
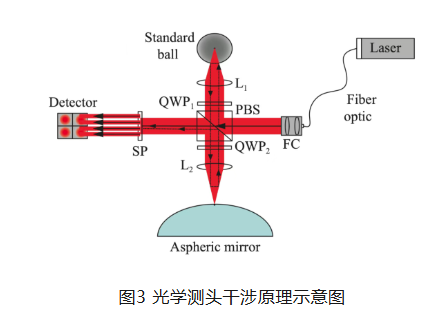
测头是坐标测量系统的核心,其性能直接决定系统测量精度。本系统采用激光干涉原理的非接触式测头,集成阵列式波片的四象限干涉测量技术,具备高精度、小体积、高动态性能的优势:
光学原理上,通过偏振分光、两次λ/4波片相位调制实现参考光与测量光的干涉,通过四通道光电探测器同步采集获取相对位移信息;
性能指标上,测头静态分辨率优于1nm,2000mm测量范围内标准差为48.58nm;动态测量时30μm量程内测量偏差为±3nm;
结构优势上,相比传统单频干涉系统集成度更高、体积更小,可支持更大的测头旋转角度,降低扫描机构负载,适配复杂面形的跟踪扫描需求。
3.3共基准可溯源空间定位方法
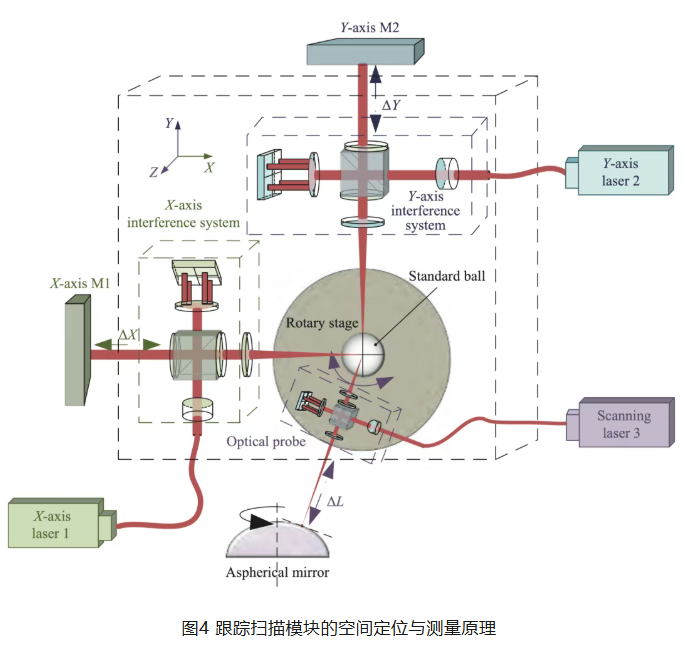
为保障扫描模块的空间定位精度,同时实现测量结果的量值溯源,本系统采用运动基准与测量基准统一的共基准设计:
跟踪扫描模块内置φ25mm标准基准球,作为模块运动、干涉定位系统、干涉测头三者的共同测量基准;
采用两路垂直布置的激光干涉定位系统,通过测量基准球与计量框架上参考镜的相对位移,实时获取基准球在平面内的精确空间坐标;
干涉测头围绕基准球做等距圆周转动,结合基准球坐标、测头转角、被测点相对位移三个参数,可直接计算得到被测点的绝对空间坐标。
该设计实现了测量值直接溯源至光波长“米”定义,从根本上解决了非球面测量的量值溯源难题。
4、测量精度试验与结果分析
4.1试验环境与测试对象
本次试验在计量级恒温恒湿实验室环境下开展,环境参数控制为:温度20.05~20.16℃,相对湿度51.9%~52.3%,气压1013.2~1013.3hPa。试验固定待测工件,仅通过跟踪扫描模块完成子午线扫描,排除转台误差对测量结果的干扰。
测试对象包括两类标准件:
1.φ25mm一级精度标准球;
2.直径40mm的轴对称非球面反射镜。
4.2标准球轮廓测量验证
对φ25mm标准球圆周轮廓连续重复测量5次,测量范围为顶点至径向10mm区域,将实测数据与标准球理论值对比得到测量误差:
全测量范围内系统测量误差小于0.2μm;
5次测量的重复性精度优于65nm,测量稳定性优异。
4.3非球面镜子午线测量验证
对直径40mm非球面镜的子午线轮廓连续重复测量5次,测量范围为顶点至径向14mm区域,将实测数据与非球面理论母线对比:
全测量范围内测量不确定度小于0.2μm;
5次测量的重复性精度为70nm,与标准球测量结果一致性良好。
试验结果表明,本方法对不同面形的光学反射镜均具备稳定的亚微米级测量精度,分离式计量框架有效保障了测量结果的可靠性。
5、技术价值与应用场景
本测量方法突破了传统非球面测量的技术瓶颈,具备三大核心技术价值:
1.高精度:实现亚微米级测量精度与纳米级重复性,满足高端光学元件的检测需求;
2.可溯源:通过共基准设计实现测量值溯源至国际长度基准,解决了行业量值不统一的痛点;
3.高通用性:适配各类轴对称非球面反射镜的测量需求,可覆盖从中小口径到大口径元件的检测场景。
该技术可广泛应用于航天光学、半导体光刻、高端激光装备、科学仪器等领域的非球面元件加工检测与质量管控,也可作为非球面测量仪器的校准溯源技术方案,推动行业测量标准的统一。
本文提出的高精度轴对称非球面反射镜轮廓测量方法,通过通用化扫描轨迹建模、分离式计量框架设计、纳米级干涉测头、共基准可溯源定位四大核心技术,实现了非球面轮廓的亚微米级高精度测量。试验验证表明,该方法测量误差小于0.2μm,重复性精度达70nm,测量结果稳定可靠,同时具备完整的量值溯源能力,为非球面光学元件的高精度检测提供了成熟、可行的技术路径,也为行业测量标准的建立提供了技术支撑。
-
近轴光学:光学系统优化的基准与原点
当我们用严谨的光路追迹公式还原宽光束的真实传播路径,总会直面一个冰冷的现实:经过单个折射球面后,不同孔径角的光线无法汇聚于光轴的同一点。球差的存在,让完美成像成了现实里的难题。而近轴光学的诞生,恰似人类用数学为光学世界搭建起的一座理想国——它不直接解决现实的像差问题,却为所有光学设计指明了最终的航向,是整个光学系统优化不可或缺的基准与原点。
2026-07-02
-
光学图纸的语言进化:ISO 10110-6:2025新版标准与工程师日常
2025年5月,ISO 10110-6发布了第三版,距离上一版整整十年。这十年里,自由曲面从实验室走进产线,AR光波导从PPT变成产品——图纸上标注中心偏差的方式,也在悄悄变了。
2026-07-02
-

光学材料折射率精密测量:从V棱镜法到最小偏向角法的技术选择
折射率是光学设计的第一组输入参数——透镜的曲率半径、厚度、间隔,所有几何参数的计算都建立在准确的折射率数据之上。nd偏差0.001,经多片透镜累积放大后,系统焦点漂移可达数十微米。本文从工程选型角度,对比V棱镜法和最小偏向角法两种主流折射率测量方案的精度、适用条件和产线效率,帮助光学制造企业根据实际需求做出合理选择。
2026-07-01
-
球柱面透镜全解析:从柱镜原理到等效球镜计算
配镜时我们常听到“散光要加柱镜”的说法,单纯的近视与远视依靠球面透镜即可矫正,而散光的矫正则离不开柱面透镜与球柱面透镜。验光单上的柱镜度数、轴位、等效球镜等关键参数,都源于这类透镜的光学特性。本文从基础原理出发,系统梳理柱面与球柱面透镜的核心知识。
2026-07-01
-

光学面形检测方法对比:干涉仪、轮廓仪、夏克哈特曼——如何选择?
面形精度是光学元件最重要的质量指标之一。在光学车间里,面形检测设备的选择直接影响加工效率和良率。干涉仪、轮廓仪、夏克-哈特曼波前传感器——三种主流方法各有精度边界和适用场景。本文从精度、速度、适用面形和成本四个维度系统对比,帮助光学制造企业做出合理选择。
2026-07-01







