
单管双目微光夜视物镜系统设计(一)——参数分解与方案优化
微光夜视技术作为现代夜视装备的核心支撑,在夜间探测、安防监控、军事侦察等领域具有不可替代的作用。本文围绕单管双目微光夜视仪物镜系统的设计展开研究,基于探测方程、无热化及轻量化技术方案,完成系统参数分解、计算、优化及性能验证,为后续光学系统详细设计提供理论依据与技术支撑。

一、设计需求明确
本次设计的核心目标是研发一款适用于单管双目微光夜视仪的物镜系统,需严格满足以下技术指标,确保系统在复杂低照度环境下的稳定可靠运行:
在照度为1×10⁻³lx(晴朗星光)的低照度环境下,针对临界尺寸Hₜ=2m的车辆目标,系统探测距离需不低于1000m,识别距离不低于800m;仪器视放大率设定为4倍,满足远距离观测需求;环境适应性方面,需保证系统在-30℃~+50℃的宽温度范围内正常工作;同时,要求系统成像清晰,具备10m~∞的调焦能力,且实现轻量化设计,适配长期佩戴使用场景。
二、任务分析与技术难点
微光夜视系统的工作环境为极低照度场景,因此物镜系统需具备较大的相对孔径,以收集足够的环境光能,保障成像质量。结合像增强器的性能参数,其光阴极响应波段为400nm~900nm,物镜系统需重点校正该波段的色差,确保光线成像精准。此外,环境温度的剧烈变化会导致光学元件参数漂移,进而影响成像质量,因此无热化设计是本次研发的关键技术要点之一。
综合分析,本次设计的主要技术难点集中在三个方面:一是大相对孔径(经后续计算确定约为1:1.43)条件下,高级像差的有效校正;二是系统总长与重量的平衡,需在保证光学性能的前提下实现轻量化;三是含塑料非球面元件的热稳定性控制,避免温度变化对系统成像造成显著影响。本次设计将依据光子噪声理论、修正的布莱克勒视距探测方程以及光学传递函数测量(MTF)评价体系,完成物镜参数的解析计算与多方案优化,攻克上述技术难点。
三、总体设计流程
3.1系统组成
本次设计的核心对象为物镜系统,配套组件包括已选型的像增强器与目镜系统。其中,像增强器光阴极通光孔径为16mm,极限分辨力为48lp/mm;目镜系统不在本次设计范围内,仅需保证物镜系统与目镜系统的参数匹配。
3.2设计流程
为确保设计的科学性与严谨性,本次物镜系统设计遵循以下流程逐步推进:
首先,根据探测方程计算物镜有效口径D、焦距f₀′、相对孔径、视场角等核心参数;其次,计算微光物镜T数,验证其是否符合国军标相关要求;随后,利用修正视距探测方程估算探测距离,验证设计指标的可行性;接着,进行物镜结构选型,对比匹兹伐型与双高斯型结构的优劣,确定初始设计结构;之后,通过多阶段优化逐步提升系统性能,包括传统全球面6片式结构优化、折/衍混合结构优化、塑料非球面+折/衍混合结构优化及无热化设计;最后,通过MTF、垂轴像差、畸变等指标评价系统成像质量,确保满足设计要求。
四、物镜设计参数计算
结合设计需求与相关理论公式,对物镜系统核心参数进行精准计算,为后续结构设计与优化提供数据支撑。
4.1有效口径D的计算
微光夜视系统的光子噪声限制分辨力由探测方程描述,结合识别距离L=800m、目标临界尺寸Hₜ=2m、识别空间频率N_识别=4、最佳分辨力对应空间频率N_最佳=12(考虑20%损失)等参数,代入相关公式计算可得,物镜有效口径D满足系统聚光与分辨力需求。
4.2焦距f₀′的计算
由像增强器调制度所限制的仪器分辨力α₁满足相关计算公式,结合像增强器极限分辨力Nᵢ=48lp/mm的参数,计算得出物镜焦距f₀′,确保系统视放大率与成像清晰度符合设计要求。
4.3相对孔径与视场角
根据有效口径与焦距计算得出相对孔径约为1:1.43;以像增强器光阴极通光孔径μ=16mm作为视场光阑,计算得出系统半视场角,保障观测视场满足使用需求。
4.4调焦量
依据高斯公式,当物距为∞时,像距l′=100mm;当物距为10m时,像距l′≈101mm,计算得出调焦量Δ=1mm,适于采用整体外调焦方式,实现10m~∞的清晰调焦。
4.5T数校验
微光夜视仪工作在低照度环境下,T数是表征物镜聚光能力的核心指标。根据T数定义及国军标要求,焦距≥100mm、相对孔径1:1.43的物镜最低T数≥1.75,本次计算得出的物镜T数符合该标准,确保系统在低照度环境下的成像性能。
4.6像增强器MTF数据及拟合
基于像增强器MTF实测值,拟合得到经验公式,为后续探测距离估算与成像质量评价提供数据支撑,其中Aₖ为系统空间频率(lp/mm)。
五、探测距离详细估算
探测距离是微光夜视仪的核心性能指标,本次设计在经典布莱克勒方程基础上,从大气透过率、目标长宽比、对比度、反射率和光谱匹配等方面进行修正,建立更贴合实际工程应用的视距探测方程,确保探测距离估算的准确性。
5.1理想视距公式与修正方程
理想视距公式以物镜焦距f₀、目标尺寸Hₜ、发现与识别对应的线对数N、系统分辨率Aₖ为核心参数;修正后的视距探测方程补充了大气透过率、目标反射率等关键影响因素,提升了估算的实用性。
5.2计算参数与结果
结合晴朗星空/透空背景、车辆目标的实际场景,确定各项计算参数取值,将像增强器MTF经验公式代入修正后的视距探测方程,联立求解得到系统空间频率。代入理想视距公式计算,并考虑系统透过率、大气衰减及像增强器增益限制等综合因素,经完整迭代后,最终估算系统探测距离为1560m,显著优于1000m的设计指标,验证了物镜系统设计参数的合理性。
六、物镜系统光学设计与优化
6.1初始结构选型
对比匹兹伐型与双高斯型两种常见物镜结构,双高斯型结构具有良好的对称性,可自动抵消垂轴像差,易于校正大相对孔径下的像差,且视场可达40°~50°,更适配本次设计需求,因此选定双高斯型作为物镜初始结构。
6.2多阶段优化方案与性能
为实现系统性能与轻量化、宽温适应性的平衡,本次设计采用四阶段优化方案,各阶段关键性能如下:
一是传统全球面6片式结构,在40lp/mm时,轴上MTF为0.61、轴外MTF为0.41,系统重量304g、总长128mm,虽能满足基本成像需求,但重量与尺寸较大,不适宜长期佩戴;
二是折/衍混合结构,将衍射面(Binary2)设置于第一面,优化后系统总长缩短至113mm,重量降至250g,MTF指标显著提升,成像质量得到改善;
三是塑料非球面+折/衍混合结构,将第三片玻璃替换为E48R材质塑料非球面(二次曲线常数-0.09794),系统重量进一步降至198g,仅为传统方案的65%,MTF指标持续提升,畸变控制在0.49%;
四是无热化设计,针对塑料元件温度敏感性强、极端温度下MTF急剧恶化的问题,采用被动无热化技术,由玻璃承担主要光焦度,塑料非球面作弱光焦度补偿,衍射面辅助消热差。优化后,在-30℃~+50℃的工作温度范围内,40lp/mm处轴上MTF≥0.70、轴外≥0.50,全视场畸变≤0.40%,垂轴像差得到良好控制,满足宽温工作需求。
本文基于微光夜视探测方程和像增强器特性,完成了单管双目微光夜视仪物镜系统的完整参数分解与设计优化。通过引入折/衍混合元件、塑料非球面和被动无热化技术,在保证系统成像质量的前提下,显著减轻了系统重量、缩短了总长,并实现了宽温度范围内的稳定工作。
最终设计结果表明,系统探测距离可达1560m,识别距离满足800m的设计指标,系统重量仅为198g,各项性能均符合设计要求,完全适配现代化微光夜视装备高机动、轻量化及全天候使用的核心需求,为后续系统集成与工程化应用奠定了坚实基础。
-
平的也能当透镜?一文看懂超表面透镜是什么
我们每天拿的手机,后置摄像头总是凸出来一块,放桌上都放不平。这是因为要想拍照清晰、夜景够亮、拍得够远,就得在里面塞好几片玻璃透镜,叠起来自然就厚了。
2026-06-18
-

光学镜头坎合工艺全解析:精密自定心组装的原理、技术难点与解决方案
随着光学镜头向高像素、高成像质量、小型化方向持续演进,多镜片架构成为行业主流,传统仅依靠镜筒内径约束同轴度的堆叠组装方式,已难以满足高端镜头的偏心控制与结构稳定性要求。在此背景下,坎合工艺凭借机械啮合自定心、低偏心误差、结构稳固等核心优势,逐渐成为精密光学镜头组装的主流技术方案。
2026-06-18
-
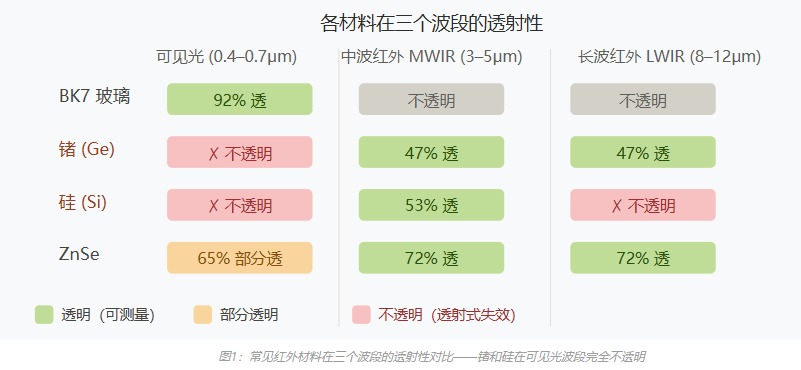
红外镜头偏心测量:为什么可见光测不准?——从材料特性到多波段直接测量
拿可见光定心仪去测红外镜头,数据看着"还行",装出来MTF就是不达标——这在红外光学行业不是个别现象。红外材料折射率高、热膨胀系数大、波段不透明,三重壁垒让传统的透射式定心方法处处翻车。这篇技术深潜,拆解红外偏心测量的四大难点,讲清楚为什么必须用"使用波长直接测",以及多波段反射式定心仪到底怎么选。
2026-06-18
-
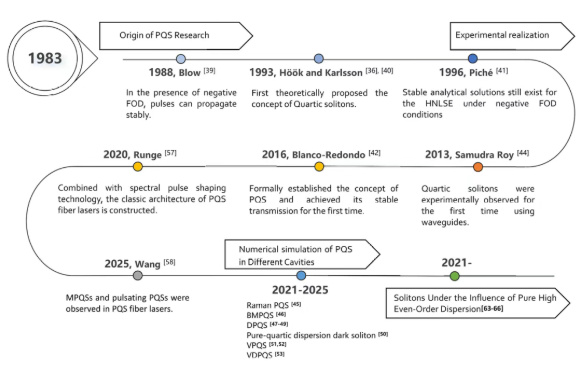
纯高偶次色散主导光孤子研究取得重要进展 纯四次孤子为超快激光领域开辟新路径
近日,陕西师范大学物理学与信息技术学院李晓辉研究员团队在国际权威期刊《Laser & Photonics Reviews》发表题为"Optical solitons dominated by pure-high-even-order dispersion: research progress of pure-quartic solitons"的综述论文,系统总结了纯四次孤子在不同腔结构中的实验实现与数值模拟研究进展,深入阐述了纯高阶偶次色散孤子的核心特征、技术突破与应用潜力。该工作为超快激光科学领域的高阶色散调控研究提供了重要的理论参考与技术指引。
2026-06-17
-
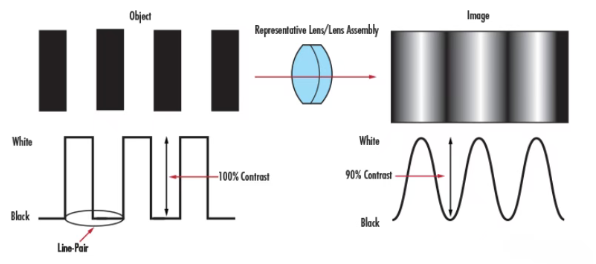
MTF还是WFE?光学镜头品控指标的工程选择与协同应用 ——从物理定义、检测方法到产线决策的完整分析框架
在光学镜头制造中,MTF(调制传递函数)与WFE(波前误差)是质量控制的两种核心指标,但二者来自不同的物理体系。MTF属于成像评价语言,直接对接最终用户体验;WFE属于波前评价语言,擅长定位加工误差来源。选用不当,轻则检测数据与客户反馈不一致,重则导致批次性误判。本文从物理定义、检测方法、换算关系、产线适用性四个维度,系统分析两类指标的特性和互补关系,并结合手机镜头和干涉仪物镜的实际产线案例,提出分层协同的应用框架。
2026-06-17







