
激光雷达技术应用前景
激光雷达技术的应用前景非常广阔并且不断发展。以下是几个主要的应用领域及其前景:
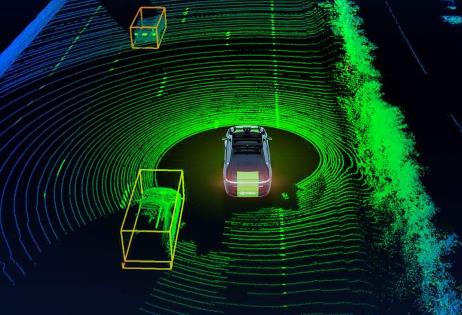
1.自动驾驶汽车:
自动驾驶是激光雷达最热门、最有前景的应用领域之一。高精度激光雷达可以实时生成车辆周围环境的三维图像,帮助自动驾驶系统进行精准定位、避障、路径规划等关键操作,保障驾驶安全。随着自动驾驶水平的提高和技术成熟度的提高,汽车行业对激光雷达的市场需求将大幅增加。
2.无人机和机器人导航:
激光雷达还广泛应用于无人机和地面机器人中,实现地形测绘、目标识别与跟踪、自主导航等功能,为无人机在农业监测、物流配送、搜救等领域提供高精度的空间感知能力。
3.智慧城市和智能交通:
在城市规划、交通管理等方面,激光雷达可以实时获取道路信息、交通流量数据和行人活动,有助于优化交通流量,提高道路安全,支撑智慧城市建设中的各类智能化应用。
4.测量与地理信息系统:
在遥感测绘领域,利用激光雷达开展高精度地形测绘、地物特征分析、地质灾害预警等,实现地球表面形态的精准描绘和动态监测。
5.军事应用:
在军事上,激光雷达被应用于战场侦察、导弹制导、火控系统、无人机探测、防御系统、气象观测等多个方面,以提高军事行动的准确性和效率。
6.建筑和文化遗产保护:
通过激光雷达扫描可以生成建筑物和历史文物的高精度三维模型,对于建筑测量、遗产保护、历史古迹修复等工作具有重要意义。
7.环境保护与生态研究:
激光雷达还可以应用于森林资源调查、植被覆盖评估、土壤侵蚀监测、空气质量监测等各种环境和生态研究领域。
未来,随着激光雷达技术的不断进步和成本的逐步降低,其应用范围将进一步扩展到更多行业和场景,包括但不限于太空探索、海洋探测、虚拟现实/增强现实(VR/AR)、人工智能视觉等前沿领域。同时,固态激光雷达的发展将使设备更加小型化、集成化,有望带来更多创新的应用产品和服务。
延伸阅读:
激光雷达是一种利用激光束进行测距和探测的遥感技术。它通过发射脉冲激光并测量返回信号与发射时间之间的延迟来生成高精度三维空间图像,从而计算出目标物体的距离、速度和形状信息。
其工作原理主要包括以下步骤:
1.发射:激光雷达系统中的激光器发射一个或多个短激光脉冲。
2.反射:这些激光脉冲撞击环境中的物体后会发生散射或反射。
3.接收:系统中的光电探测器捕获反射的激光回波信号。
4.测距:根据光速以及激光脉冲发射与探测器接收之间的时间差,可以精确计算出目标距离。
5.扫描:为了获得更全面的信息,激光雷达可以通过机械旋转或固态相控阵对空间中的光束进行扫描,构建环境的三维点云模型。
6.数据处理:捕获的数据经过复杂的算法处理,可用于识别物体、提取特征、构建地形图、分析环境结构等。
-
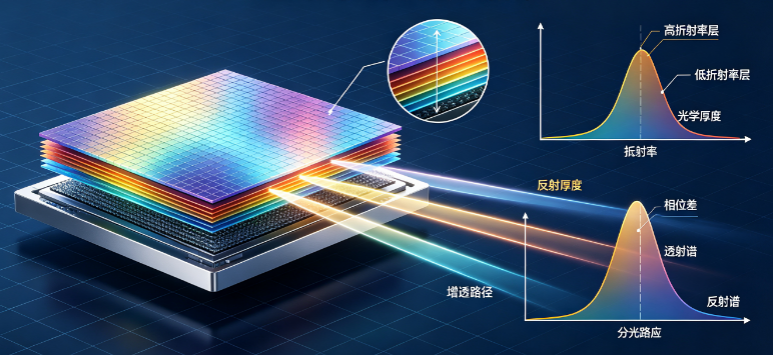
光学薄膜膜系设计基础:增透膜、反射膜与分光膜的原理与工程选择
一片未经镀膜的冕牌玻璃表面,仅因菲涅耳反射就会损失约4%的入射光。经过6~8片镜片的镜头,累积光损失可达25%~35%。光学薄膜的核心任务,就是通过精确控制纳米级厚度的介质膜层,将光的反射、透射和吸收特性调节到设计目标。本文从薄膜光学的基本原理出发,系统介绍增透膜、高反射膜和分光膜三类最常用膜系的设计思路和工程考量。
2026-07-08
-

光学元件精密清洁与维护:从实验室到产线的操作规范
一颗直径5μm的灰尘颗粒,落在干涉仪参考面上,产生的散射信号足以让λ/50的精度退化到λ/10。在精密光学领域,清洁不是"擦干净就行"的保洁工作——它是保护光学表面和测量精度的一道严谨工序。本文从污染物类型、清洁剂选择、操作手法和设备维护四个维度,系统梳理光学元件的精密清洁规范。
2026-07-08
-

ImageMaster® 系列全景:从产线快检到实验室高精度,MTF 测量怎么选
今天就跳过理论推导,直接从产品功能出发,把 ImageMaster® 整个系列理一遍:每台设备能测什么、测多快、精度多少、适合谁用。看完这篇,选型基本心里有数。
2026-07-08
-

激光损伤阈值(LIDT)测试技术:ISO 21254标准解读与工程实践
高功率激光系统中的光学元件,承受着每平方厘米数焦耳至数千焦耳的能量密度。一片反射镜的膜层在若干次脉冲后出现针孔——系统功率被迫降级,甚至整机返修。激光诱导损伤阈值(LIDT)是决定光学元件"能承受多强的光而不坏"的核心参数。本文从损伤机理、ISO 21254标准测试方法和工程选型三个维度,系统介绍LIDT测试的技术体系。
2026-07-07
-

DUV vs EUV光刻物镜装调:两种技术路线的精度博弈
DUV 和 EUV,两代光刻技术的核心光学系统,分别在 193nm 和 13.5nm 波长下工作。它们的装调精度要求相差的不是百分比,而是数量级。更关键的是,它们的装调方法论本身就是两套完全不同的逻辑。
2026-07-07







