
光刻物镜波像差绝对检测技术研究进展与发展趋势
光刻物镜是半导体投影光刻机的核心功能部件,其波像差水平直接决定光刻机的成像分辨率与套刻精度,是制约半导体制程节点持续缩小的核心光学指标。随着先进光刻技术向亚5nm节点推进,光刻物镜的波像差控制要求已降至0.5nmRMS以下,传统波像差检测方法受限于仪器系统误差与参考元件加工精度,无法满足亚纳米级的检测需求。绝对检测技术通过多维度测量与误差解耦算法,可从相对测量结果中分离仪器系统误差、参考元件误差与环境随机误差,是突破波像差检测精度极限的核心技术路径。本文系统梳理了光刻物镜波像差检测的基础技术体系,阐述了经典波前绝对检测技术的原理与技术特征,重点总结了绝对检测技术与传统波像差检测方法融合的四类主流技术路线的研究进展,对比分析了各技术路线的精度水平、适用场景与技术局限,最后结合高数值孔径极紫外光刻的技术需求,展望了光刻物镜波像差绝对检测技术的未来发展方向。

一、引言
半导体光刻工艺是集成电路制造的核心环节,其通过光学投影方式将掩模上的纳米级电路图案转移至晶圆表面,光刻系统的成像质量直接决定了集成电路的制程节点与生产良率。作为光刻机三大核心子系统之一,投影光刻物镜是实现纳米级图案高精度转移的核心载体,其光学成像性能是光刻机分辨率、套刻精度与线宽均匀性的核心决定因素。波像差作为表征光刻物镜成像质量的核心计量指标,反映了实际出射波前与理想球面波前的相位偏差,其检测精度直接决定了光刻物镜的装调精度与最终成像性能。
随着摩尔定律的持续推进,先进光刻技术已进入极紫外(EUV)光刻与高数值孔径(HighNA)EUV光刻时代,光刻物镜的波像差控制要求从早期的数十纳米逐步提升至0.5nmRMS以下,对波像差检测技术的精度、重复性与可靠性提出了前所未有的要求。传统波像差检测方法的精度受限于干涉仪参考元件加工精度、仪器固有系统误差与环境扰动,难以满足先进光刻物镜亚纳米级的检测需求。绝对检测技术通过多位置、多姿态的组合测量,结合误差解耦算法实现系统误差与待测波像差的分离,可有效突破传统检测方法的精度瓶颈,已成为高端光学系统波像差高精度检测的核心技术方向。
当前,全球高端光刻机与核心检测技术主要由ASML、Canon、Nikon等国际厂商垄断,其高精度波像差检测技术属于核心商业机密,未对外公开。国内中国科学院上海光学精密机械研究所、中国科学院长春光学精密机械与物理研究所等科研团队在波像差检测与误差抑制领域已取得阶段性进展,但在亚纳米级绝对检测技术的工程化应用层面仍存在一定差距。开展光刻物镜波像差绝对检测技术的系统研究,对提升我国高端光刻物镜的研发制造能力、突破半导体领域的技术封锁具有重要的战略意义。本文系统梳理了波像差检测与绝对检测技术的发展脉络,总结了当前主流技术路线的研究进展与技术特征,分析了下一代光刻技术面临的挑战与未来发展方向。
二、光刻物镜波像差检测基础技术体系
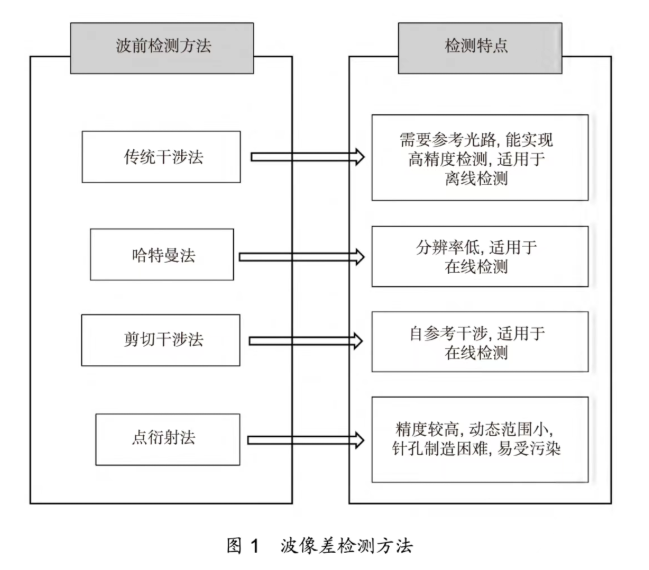
波像差检测的核心原理是通过光学手段获取待测波前的相位分布,将其与理想参考波前进行对比,解算出波前的相位偏差。当前主流的光刻物镜波像差检测技术可分为传统干涉法、哈特曼检测法、剪切干涉法与点衍射干涉法四类,各类技术基于不同的光学原理,在检测精度、适用场景与系统复杂度上存在显著差异。
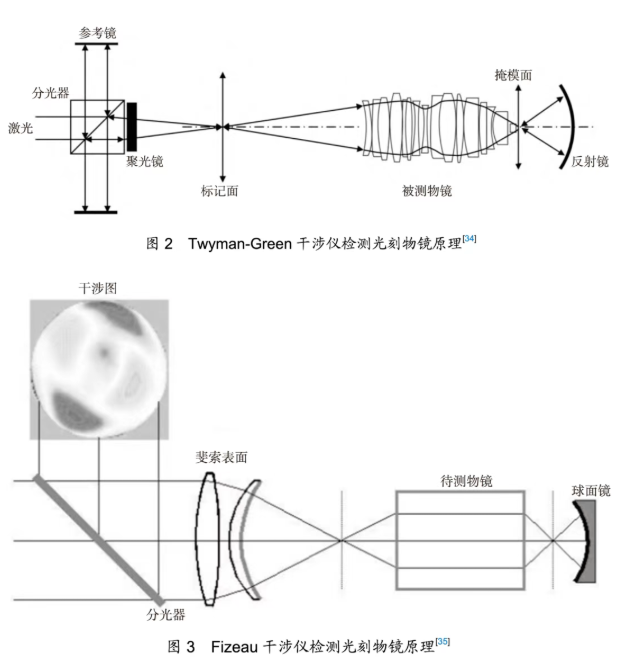
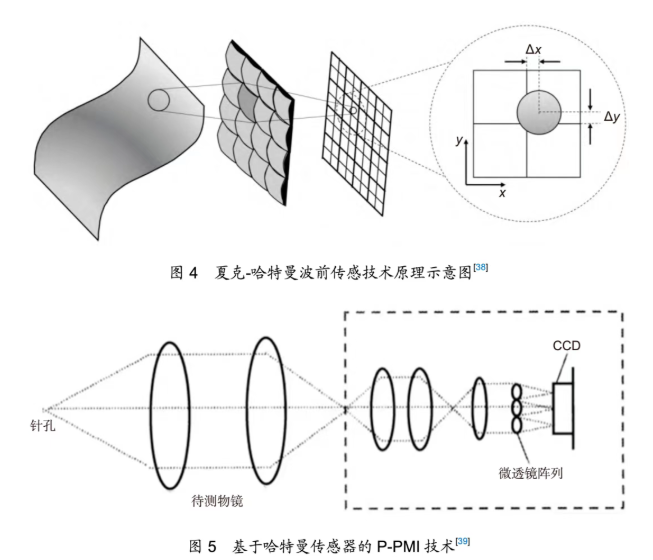
2.1传统干涉法
传统干涉法是最早实现工程化应用的波像差检测技术,主流技术路线包括TwymanGreen型干涉仪与Fizeau型干涉仪两类,其核心原理是通过高精度标准光学元件生成理想参考波前,参考波前与携带物镜像差信息的待测波前发生干涉,通过对干涉条纹的解调与计算,重构待测波前的相位分布。传统干涉法具有检测精度高、算法成熟的优势,主要适用于光刻物镜的离线装调检测。该技术的核心局限性在于检测精度直接受限于参考光学元件的面形加工精度,参考元件的固有误差将直接耦合至测量结果中,难以实现亚纳米级的高精度检测。
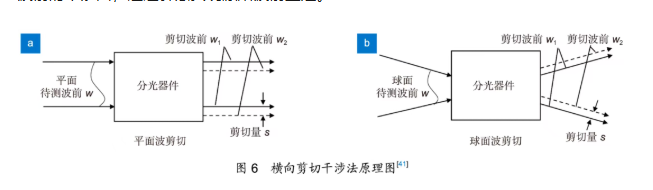
2.2哈特曼检测法
哈特曼检测法由德国科学家Hartmann于1900年提出,其核心原理是在被测系统的出瞳位置放置小孔阵列或微透镜阵列,将待测波前分割为若干个子光束,通过探测器采集子光束的实际聚焦位置与理想位置的偏移量,计算得到波前在水平与垂直方向的斜率分布,最终通过斜率数据重构波前相位。1971年Shack与Platt提出采用微透镜阵列替代小孔阵列,大幅提升了光能利用率,形成了当前广泛应用的夏克哈特曼检测技术。该技术具有系统结构简单、对环境扰动鲁棒性强、可实现在线检测的优势,日本Nikon公司基于该技术开发的PPMI检测系统已实现光刻物镜波像差的工程化检测。该技术的局限性在于空间分辨率受限于微透镜阵列的单元尺寸,波前重构过程易引入计算误差,传统方案难以满足EUV光刻物镜的亚纳米级检测需求。
2.3剪切干涉法
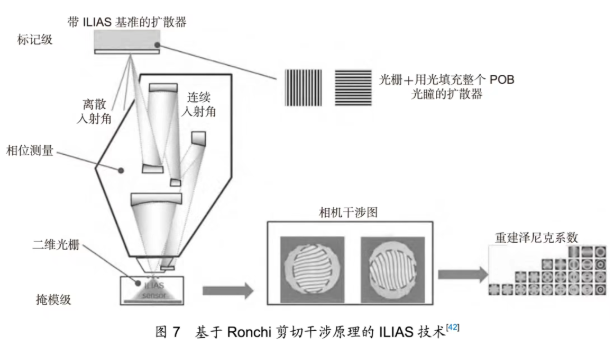
剪切干涉法是一种无需独立参考波前的共路干涉检测技术,其核心原理是通过光学元件将待测波前分为两个存在微小横向位移的同源波前,两个波前在重叠区域发生干涉,通过对干涉条纹的解调重构原始波前的相位分布。根据剪切方向的差异,剪切干涉法可分为横向剪切、径向剪切、旋转剪切与反转剪切四类,其中横向剪切干涉法是光刻物镜检测领域应用最广泛的技术路线。该技术具有无需高精度参考元件、抗震动性能优异、检测精度高的优势,ASML公司开发的ILIAS剪切干涉检测系统,已成为其光刻机波像差原位检测的核心技术。该技术的局限性在于系统结构相对复杂,波前重构算法难度较高,仪器固有系统误差仍会影响最终检测精度。
2.4点衍射干涉法
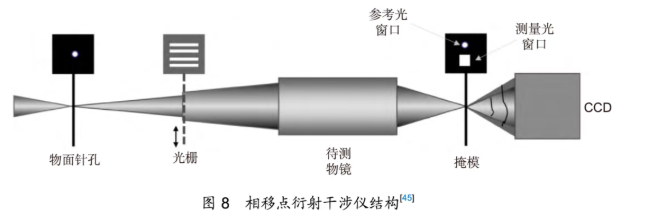
点衍射干涉法的核心原理是通过尺寸小于衍射极限的针孔生成近理想的球面参考波前,参考波前与携带物镜像差信息的测试波前发生干涉,通过干涉条纹解调得到待测波像差。1996年Medecki等人提出的相移点衍射干涉仪(PS/PDI),通过光栅相移技术大幅提升了检测精度,成为该技术的主流方案。Canon公司基于线衍射原理开发的原位检测系统,已实现光刻物镜波像差的在线检测。该技术的理论检测精度为四类基础技术中最高,但其核心局限性在于,随着光刻工作波长的缩短,所需针孔的尺寸持续减小,针孔的光通量大幅降低,导致干涉条纹对比度下降,最终限制了检测精度的进一步提升。
三、经典波前绝对检测技术原理
绝对检测技术最早应用于高端光学元件的面形高精度检测,其核心思想是通过多组不同姿态、不同位置的组合测量,建立误差解耦方程组,将参考元件误差、仪器系统误差与待测元件的面形误差进行分离,从而得到待测面形的绝对分布,消除系统误差对检测结果的影响。当前经典的波前绝对检测技术主要包括以下五类:
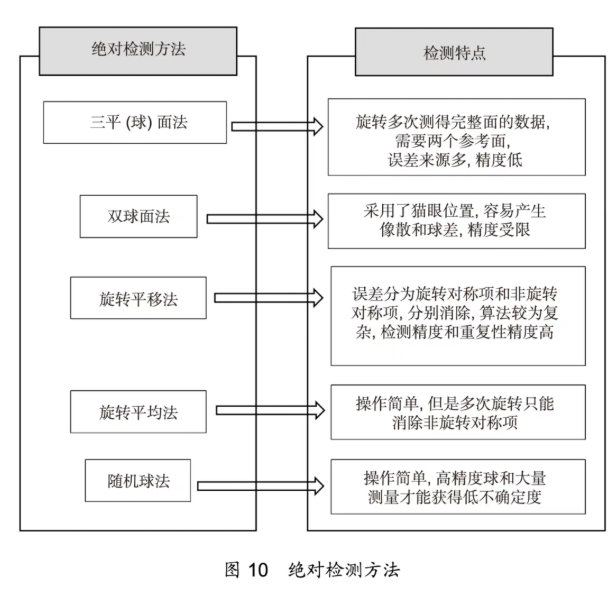
3.1三平(球)面法
三平面法由Schulz与Schwider于1967年提出,是最早的绝对检测技术,其核心原理是选取三个精度相近的待测平面,通过两两组合测量与待测面的翻转、旋转操作,建立误差解算方程组,分离参考面的固有误差,得到待测平面的绝对面形分布。1971年Harris等人将该技术拓展至球面检测领域,形成了三球面法。该技术的原理简单、算法成熟,但其核心局限性在于每次测量仅能得到一条线上的面形数据,需通过多次旋转测量才能重构完整的面形分布,且需要两个额外的参考元件,误差来源复杂,检测精度与检测效率难以兼顾。
3.2双球面法
双球面法由Jensen于1976年提出,是球面波前绝对检测的经典技术,其核心原理是通过待测球面的初始位置、180°旋转位置与猫眼位置的三次测量,建立误差方程组,分离参考镜的系统误差,得到待测球面的绝对面形。1994年Selberg提出五位置双球面法,增加了90°与270°旋转位置的测量,消除了旋转轴与光轴的对准误差。该技术的测量步骤较三球面法大幅简化,但其核心局限性在于猫眼位置的调整精度要求极高,调整误差易引入像散与球差,最终限制检测精度。
3.3旋转平移法
旋转平移法由Schulz与Schwider于1976年提出,其核心原理是将待测波前的误差分解为旋转对称分量与非旋转对称分量,通过待测面绕光轴的等角度旋转测量,解算出非旋转对称误差分量;通过参考面的平移测量,解算出旋转对称误差分量,最终实现系统误差与待测误差的完全分离。该技术具有检测精度高、操作流程简单的优势,是当前光学元件面形检测领域应用最广泛的绝对检测技术。其核心局限性在于仅适用于可同时实现旋转与平移操作的反射式光学元件检测,无法直接应用于透射式光学系统的波像差检测。
3.4旋转平均法
旋转平均法由Evans与Kestner提出,可同时适配反射波前与透射波前的绝对检测。其核心原理是将待测波前相对于参考波前绕光轴进行N次等角度旋转测量,通过对N次测量结果的平均处理,消除待测波前的非旋转对称误差分量,实现系统误差与待测波前误差的分离。该技术的适用范围广、算法简单,但其核心局限性在于会丢失角向阶数为kN的波前误差分量,需通过额外的测量与拟合手段进行补偿。
3.5随机球法
随机球法由Parks于1978年提出,其核心原理是选取一个高精度小球作为标定件,对小球的不同随机方向进行多次测量,通过对测量结果的平均处理,消除小球自身的面形误差与随机噪声,最终得到参考镜的绝对面形误差,实现干涉仪系统的误差标定。该技术的操作流程简单、无需复杂的旋转平移机构,但其核心局限性在于检测精度与测量次数直接相关,测量次数不足无法完全消除系统误差,测量次数过多则会降低检测效率并引入额外的随机误差。
四、光刻物镜波像差绝对检测技术研究进展
经典绝对检测技术主要针对单个光学元件的面形检测,无法直接应用于多镜片组成的复杂光刻物镜系统。将经典绝对检测的误差分离思想与传统波像差检测技术融合,形成了光刻物镜波像差绝对检测的四类主流技术路线,各类技术路线已实现亚纳米级的检测精度,可满足先进光刻物镜的检测需求。
4.1基于传统干涉仪的波像差绝对检测技术
基于传统干涉仪的绝对检测技术主要适用于光刻物镜的离线装调检测,核心技术路线包括双球面法与随机球法两类。
基于双球面法的绝对检测技术,将双球面三位置法与平移相减法结合,通过两次组合测量分别标定干涉仪前标准球面镜与后置平面反射镜的系统误差,最终从相对测量结果中分离出待测物镜的真实波像差。实验验证表明,该技术可将球面波前的检测精度提升至17mλRMS(10.8nm)。针对双球面法猫眼位置的调整误差问题,中国科学院上海光学精密机械研究所王向朝团队提出了基于多方向倾斜猫眼反光镜的高NA物镜像差检测方法,通过建立Zernike多项式拟合模型重构波前,当倾角误差控制在0.1%以内时,相对测量误差可控制在1%以内,可实现0.9NA物镜的高精度波像差检测。
基于随机球法的绝对检测技术,采用MachZehnder干涉仪架构,通过高精度球透镜的多次随机旋转测量,分离干涉仪的固有系统误差,实现波像差的自标定。实验表明,通过65次随机旋转测量,该技术的波像差检测不确定度可达到50mλRMS。该类技术的核心局限性在于整体检测精度较低,仅适用于中低端光刻物镜的检测,无法满足EUV光刻物镜的亚纳米级检测需求。
4.2基于哈特曼法的波像差绝对检测技术
基于哈特曼法的绝对检测技术以Nikon公司开发的PPMI技术为代表,其核心原理是通过切换物面针孔的尺寸实现系统误差的标定与物镜像差的分离。当采用小尺寸物面针孔时,探测器采集的信号包含待测物镜像差与检测系统固有误差;当采用大尺寸物面针孔时,针孔的成像尺寸大于标定针孔,探测器采集的信号仅包含检测系统的固有误差;通过两组测量结果的差值运算,即可分离得到待测物镜的绝对波像差。
实验数据表明,PPMI技术的5小时测量重复性精度可达0.1mλRMS,绝对检测精度可达19mλRMS,可满足50nm制程节点光刻物镜的检测需求。针对传统夏克哈特曼法精度不足的问题,近年研究人员将相位恢复算法引入该技术路线,改进后的波像差测量误差可控制在1nmRMS以内,已具备EUV光刻物镜的检测能力,该技术路线仍有较大的精度提升空间。
4.3基于剪切干涉的波像差绝对检测技术
基于剪切干涉的绝对检测技术是当前光刻物镜原位检测的主流技术路线,核心包括旋转物镜法、正负Talbot数法与掩模标定法三类。
旋转物镜法的核心原理是通过待测物镜绕光轴的多角度旋转测量,结合误差免疫算法选取最优旋转角度,抑制旋转偏心引入的非恒定系统误差,最终实现系统误差与物镜像差的分离。该技术结合加权三步平均法与两步误差免疫算法,检测精度可达2.5mλRMS,达到亚纳米级检测水平,是当前剪切干涉路线中精度最高的方案。其核心局限性在于算法复杂度高,对旋转机构的定位精度要求极高,且仅适用于同轴透射式光刻物镜,无法适配离轴反射式EUV光刻物镜。
正负Talbot数法的核心原理是利用光栅Talbot效应的特性,当光栅分别位于像面两侧的正负Talbot位置时,待测物镜像差引起的条纹畸变异号,而检测系统的固有误差保持不变;通过两次测量结果的差值运算,即可分离系统误差,得到待测物镜的绝对波像差。该技术的检测精度可达7mλRMS(0.1nm),可满足EUV光刻物镜的检测需求,且系统结构简单、操作流程便捷,支持原位在线检测。
掩模标定法的核心原理是通过非相干光照射像面处的标定掩模,单独采集检测系统的固有误差数据,与常规相干光测量得到的“物镜像差+系统误差”数据做差,分离得到待测物镜的绝对波像差。该技术的检测精度与正负Talbot数法相当,可达7mλRMS,且操作流程更简洁,是理想的原位检测方案。Canon公司的实验验证表明,上述三种剪切干涉绝对检测方案的标定精度均优于22mλRMS(0.3nm),可满足先进光刻物镜的检测需求。
4.4基于点衍射的波像差绝对检测技术
基于点衍射的绝对检测技术是当前检测精度最高的技术路线,其核心原理是通过两组不同掩模的组合测量,分离检测系统的固有误差。首先采用针孔窗口掩模进行常规点衍射测量,得到包含物镜像差与系统误差的测量结果;再采用窗口窗口掩模进行系统误差标定测量,得到仅包含系统误差的测量结果;通过两组结果的差值运算,即可得到待测物镜的绝对波像差。
针对传统针孔点衍射光通量不足的问题,研究人员开发了光纤点衍射干涉仪,采用单模光纤端面替代针孔生成理想球面波,可独立控制参考光与测试光的光强,大幅提升了干涉条纹对比度。中国科学院上海光学精密机械研究所团队提出的双光纤点衍射绝对检测方案,通过双光纤入射的两种测量模式实现系统误差标定,最终检测精度可达0.45mλRMS,是当前公开报道中精度最高的光刻物镜波像差检测技术,可完全满足EUV光刻物镜的亚纳米级检测需求。
五、技术对比与面临的核心挑战
5.1主流技术路线综合对比
四类光刻物镜波像差绝对检测技术路线在精度、适用场景、技术复杂度等方面存在显著差异,综合对比结果如下:
1.精度水平:基于点衍射的绝对检测技术精度最高,可达0.45mλRMS;基于剪切干涉的旋转物镜法次之,可达2.5mλRMS;正负Talbot数法与掩模标定法精度约7mλRMS;基于哈特曼法的技术精度约19mλRMS;基于传统干涉仪的技术精度最低,约17~50mλRMS。
2.适用场景:基于传统干涉仪的技术仅适用于离线检测;其余三类技术均支持原位在线检测;旋转物镜法仅适用于同轴透射式物镜,其余技术可同时适配透射式与反射式物镜。
3.技术复杂度:旋转物镜法的算法与操作复杂度最高;基于传统干涉仪与点衍射的技术次之;正负Talbot数法、掩模标定法与哈特曼法的技术复杂度较低,工程化落地难度更小。
5.2当前技术面临的核心挑战
随着高NAEUV光刻技术的发展,光刻物镜波像差绝对检测技术面临三大核心挑战:
第一,检测精度要求持续提升。下一代HighNAEUV光刻物镜的波像差控制要求将突破0.2nmRMS,对检测技术的精度与重复性提出了更高要求,现有技术的精度冗余已不足。
第二,离轴反射式物镜的适配性不足。EUV光刻物镜普遍采用离轴多反射镜架构,无法通过旋转物镜的方式进行系统误差标定,传统旋转物镜法完全失效,现有技术路线需针对离轴系统进行适配性改进。
第三,原位检测的环境鲁棒性要求提升。量产光刻机的波像差原位检测需在生产环境下实现,现有高精度检测技术对环境振动、温度波动的敏感度较高,难以适配量产场景下的长期稳定运行需求。
六、发展趋势与展望
针对HighNAEUV光刻时代的技术需求,光刻物镜波像差绝对检测技术将向三个核心方向发展:
第一,开发基于物理模型的高精度绝对检测技术。针对离轴反射式物镜无法旋转的特性,建立完整的检测系统误差物理模型,通过模型参数标定与误差补偿实现系统误差的分离,替代传统的多位置旋转测量方案,是下一代绝对检测技术的核心研究方向。
第二,多技术融合的复合检测方案。将点衍射的高精度特性、剪切干涉的抗干扰特性与哈特曼法的高鲁棒性进行融合,开发兼具超高精度、强环境鲁棒性与原位检测能力的复合检测系统,满足量产光刻机的在线检测需求。
第三,人工智能辅助的误差分离与波前重构。引入深度学习算法实现波前的高精度重构与系统误差的智能分离,降低对多组测量数据的依赖,提升检测效率与环境抗干扰能力,是绝对检测技术的重要发展方向。
光刻物镜波像差绝对检测技术是突破传统检测精度瓶颈、满足先进光刻物镜亚纳米级检测需求的核心技术,对高端光刻机的研发与制造具有核心支撑作用。当前基于剪切干涉与点衍射的绝对检测技术已实现亚纳米级的检测精度,可满足当前EUV光刻物镜装调的检测需求,但面对下一代HighNAEUV光刻的技术要求,仍存在适配性不足与精度冗余不足的问题。通过误差模型驱动、多技术融合与智能算法辅助,开发适配离轴反射式高NA物镜的新一代绝对检测技术,将是未来该领域的核心研究方向,也是我国突破高端光刻检测技术封锁的重要突破口。
-

光学检测设备选型总览:不同规模光学工厂的配置思路
一家初创光学工坊可能只需要一台球径仪和一台定心仪,而一家年产千万片镜头的工厂需要覆盖从原材料检测到成品MTF的全自动检测线。光学检测设备的选型不是"买最贵的"或者"买最便宜的",而是根据产品精度、产量规模和成本预算在三者之间找到最优平衡点。本文从入门级、产线级、研发级和计量级四个层次,为不同规模的光学制造企业提供检测设备的选型参考。
2026-07-16
-
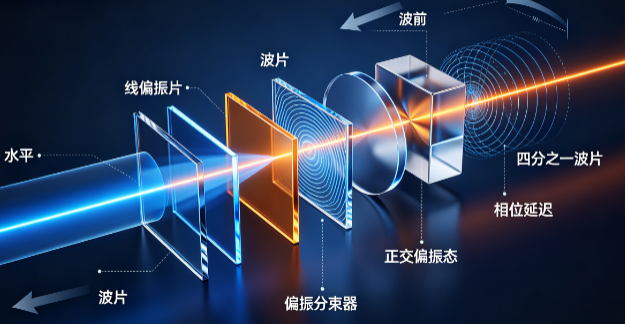
偏振光学元件的检测:消光比、偏振度与相位延迟的测量原理
在激光通信、量子光学和偏振成像系统中,偏振光学元件的品质往往以"消光比"来评价——一个消光比为10⁶:1(60dB)的偏振分光器,意味着p偏振光可以"几乎完美地透过",而s偏振光被"几乎完全抑制"。但当这个分光器在系统中因为微小的装调偏差退化到10³:1时,系统性能的劣化可能比MTF下降10%更严重。本文从消光比、偏振度和相位延迟(波片检测)三个核心参数出发,系统介绍偏振光学元件的检测方法。
2026-07-16
-

亚纳米的较量:半导体对位计量从光刻走向先进封装
SEMICON China 2026上传递出一个清晰的信号:先进封装已从"补位技术"跃升为算力竞争的核心战场。2.5D/3D堆叠、混合键合、CPO硅光互连——这些技术的共同命门只有一个字:准。
2026-07-16
-
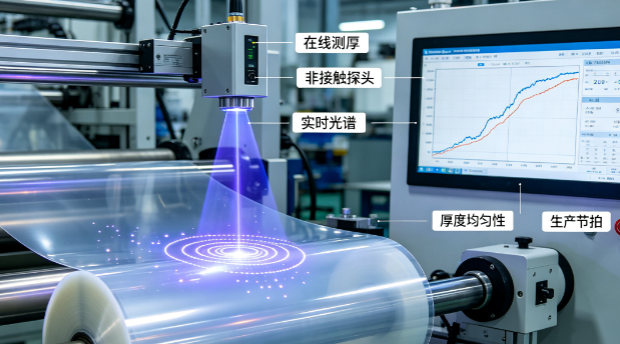
光学膜层的非接触厚度测量:从椭偏仪到反射光谱法的技术选择
一片镜片上的增透膜厚度标注为"SiO₂ 80nm±2nm"。80nm约等于400个硅原子的直径——检测这样厚度的膜层,接触式测厚仪(探针)已无法使用:探针的接触力会直接穿透膜层或造成不可逆的损伤。光学膜层的厚度测量几乎完全依赖非接触光学方法。本文从椭偏仪和反射/透射光谱法两种主流方案出发,对比其物理原理、精度边界和适用场景,为膜层检测的选型提供参考。
2026-07-15
-
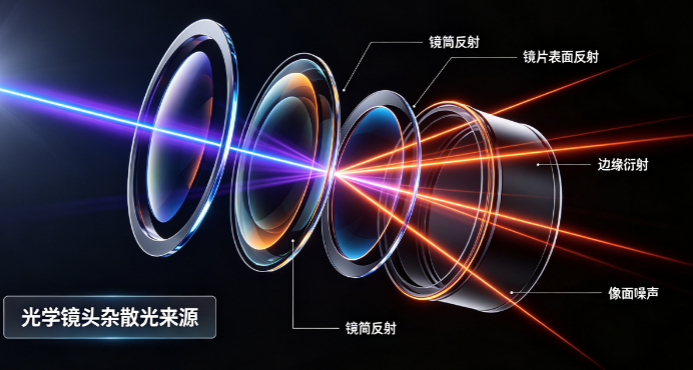
光学镜头的杂散光分析:鬼像、散射光与自生辐射的检测与控制
一张天文照片中的"飞碟状"光环、一幅夜间监控画面中的眩光条纹、一台激光通信终端中意外的背景计数——这些问题的共同根源是杂散光(Stray Light)。杂散光不携带图像信息,却占据了探测器的动态范围,降低了系统的信噪比和对比度。在精密光学系统中,控制杂散光的重要性不亚于提高MTF——一个MTF优秀的系统可以被杂散光轻易"淹没"。本文从杂散光的三类来源出发,系统介绍其检测方法和控制策略。
2026-07-15







