
光学传递函数中空间频率单位的换算及原理探析
在光学传递函数(MTF)的研究与应用中,空间频率是表征光学系统细节分辨能力的核心指标,lp/mm(线对/毫米)与cycles/degree(周/度)为其两种常用表述单位。二者因物理意义、适用场景的差异,无法通过固定系数直接换算,需依托光学系统的物像共轭关系或成像放大率,建立物方/像方线尺度与视场角的关联,实现单位间的精准转换。本文将系统阐释二者的本质区别,梳理换算核心逻辑与具体方法,并明确实操中的关键注意事项,为光学系统的设计、检测与分析提供理论参考。
一、lp/mm与cycles/degree的本质差异
lp/mm与cycles/degree的核心区别体现在物理意义、适用场景及关联物理量三个维度,二者从不同维度描述光学系统的空间频率特性,分别适配线尺度与角度尺度的分析需求,具体差异如表1所示。
表1 lp/mm与cycles/degree的核心参数对比
| 单位 | 物理意义 | 适用场景 | 关联物理量 |
|---|---|---|---|
| lp/mm(线对 / 毫米) | 单位线尺度内包含的明暗线对数量,1 线对等价于 1 个空间频率周期 | 描述像面、物面的空间细节密度,如相机传感器、光刻掩膜等器件分析 | 线尺度(毫米,mm) |
| cycles/degree(周 / 度) | 单位视场角内包含的空间频率周期数量 | 描述视场角对应的空间分辨能力,如人眼视觉、望远镜视场性能评估 | 角度(度,degree) |
简言之,lp/mm聚焦于实体平面的细节分布密度,是光学系统成像面或物面的局部细节表征指标;cycles/degree聚焦于视角范围内的细节分辨能力,是光学系统整体视场性能的宏观表征指标,二者为空间频率的不同表述形式,共同服务于光学系统分辨能力的综合评价。
二、空间频率单位换算的核心逻辑
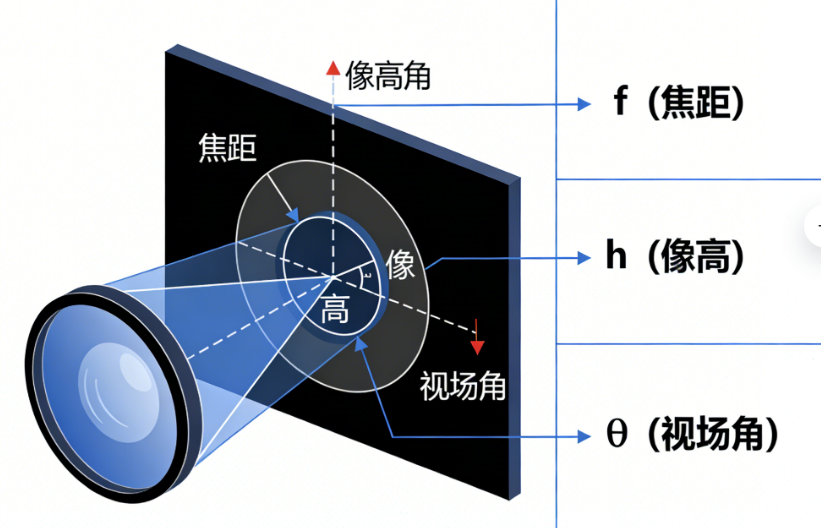
lp/mm与cycles/degree的换算本质,是实现角度维度空间频率与线尺度维度空间频率的相互转换,核心前提为建立光学系统中视场角与物/像尺度的几何关联,而这一关联的构建需依托光学系统的核心参数——焦距(f)、视场角(θ)、像高(h)或放大率(β)。
在光学系统中,像高h为像面边缘至光轴的垂直距离,当视场角θ满足小角度条件(θ<10度)时,可采用小角度近似,即tanθ≈θ(弧度),而弧度与度的换算关系为θ(弧度)=θ(度)×π/180,由此推导出像高与焦距、视场角的近似几何关系:
h≈f×θ×π/180
(式中,f为系统焦距,单位mm;θ为像方视场角,单位度;h为像高,单位mm)
若已知光学系统的放大率β(β=像高h/物高y),亦可结合物方视场角推导物/像尺度与视场角的关联,换算逻辑与上述一致,仅需替换对应物方/像方参数。
三、空间频率单位的具体换算公式
结合光学系统的实际应用场景,空间频率单位换算主要分为从cycles/degree换算为lp/mm和从lp/mm换算为cycles/degree两种类型,以下分别阐述其适用条件、换算公式及推导示例,所有公式均以像方换算为核心,物方换算可通过参数替换实现。
(一)场景1:由cycles/degree换算为lp/mm(已知像方视场角与对应像长)
适用条件
已知像方某视场角对应的空间频率f_ang(cycles/degree),及该视场角θ(度)在像面上对应的线长度L(mm),需转换为像面的线尺度空间频率f_lin(lp/mm)。
换算公式
1.计算1度视场角对应的像面长度:L_perdegree=L/θ(单位:mm/degree)
2.转换为线尺度空间频率:f_lin(lp/mm)=f_ang(cycles/degree)/L_perdegree(mm/degree)
推导示例
某相机镜头焦距f=50mm,求像面中心1度视场角对应的空间频率为0.5cycles/degree时的像面线尺度空间频率。
1.由小角度近似得,1度视场角对应的像高h≈50×(1×π/180)≈0.8727mm,即L_perdegree=0.8727mm/degree;
2.代入公式得f_lin=0.5/0.8727≈0.573lp/mm。
(二)场景2:由lp/mm换算为cycles/degree(已知系统焦距)
适用条件
已知像面的线尺度空间频率f_lin(lp/mm),及光学系统的焦距f(mm),需转换为像方视场角对应的空间频率f_ang(cycles/degree)。
换算公式
1.1线对对应的像面长度:1/f_lin(mm);
2.小角度近似下,1线对对应的视场角θ_lp(度):θ_lp≈(1/(2f_lin×f))×180/π;
3.转换为角度维度空间频率:f_ang(cycles/degree)≈(2×f_lin×f×π)/180。
推导示例
某望远镜焦距f=1000mm,像面空间频率f_lin=1lp/mm,求其对应的角度维度空间频率。
代入公式得f_ang≈(2×1×1000×π)/180≈34.9cycles/degree。
四、单位换算的关键注意事项
在空间频率单位换算的实操过程中,为保证换算结果的准确性,需重点关注以下三点核心要求,规避因参数误用、近似条件滥用导致的换算误差。
(一)严格把控小角度近似的适用范围
小角度近似(tanθ≈θ)仅适用于视场角θ<10度的场景,此时tanθ与θ(弧度)的偏差小于1%,换算误差可忽略;当θ>10度时,二者偏差将显著增大,如θ=30度时,tan30≈0.577,θ(弧度)≈0.523,偏差达10%,此时需舍弃近似公式,采用h=f×tanθ进行精确计算,确保视场角与物/像尺度关联的准确性。
(二)明确区分物方与像方的参数体系
若需进行物方空间频率的换算(如物面lp/mm对应物方视场角cycles/degree),需严格遵循物方参数匹配物方计算的原则,将像方换算公式中的像高h替换为物高y、像方焦距f替换为物方焦距f',公式逻辑保持不变,仅需完成对应参数的替换,避免物/像方参数混用导致的换算错误。
(三)拒绝固定系数换算,结合具体系统参数计算
由于不同光学系统的焦距、视场角等核心参数差异显著,如手机镜头焦距约5mm,天文望远镜焦距可达数米,二者的“视场角-线尺度”关联完全不同,因此不存在1cycles/degree=Xlp/mm的固定换算系数。所有换算均需依托具体光学系统的实测参数,代入对应公式计算,脱离系统参数的固定系数换算均不具备实际参考价值。
五、空间频率单位换算的通用流程
结合上述换算逻辑、公式及注意事项,可总结出光学传递函数中空间频率单位换算的通用流程,共分为四步,适用于所有物方/像方、不同换算方向的场景,具体步骤如下:
1.明确换算需求:确定换算方向为cycles/degree→lp/mm或lp/mm→cycles/degree,同时明确换算对象为物方空间频率或像方空间频率,划定换算范围;
2.获取系统参数:收集光学系统的核心参数,焦距f(mm)、视场角θ(度)、像高h(mm)或放大率β,任选其一即可满足换算需求;
3.建立角度-线尺度关联:根据视场角大小,选择近似公式h≈f×θ×π/180或精确公式h=f×tanθ,推导得到1度视场角对应的物/像面长度L_perdegree(mm/degree);
4.代入公式完成计算:根据确定的换算方向,代入对应场景的换算公式进行计算,全程保证单位统一(角度为度,长度为毫米),输出最终换算结果。
lp/mm与cycles/degree作为光学传递函数中空间频率的两大核心单位,是从不同维度表征光学系统细节分辨能力的关键指标,二者的换算并非简单的单位转换,而是光学系统角度尺度与线尺度的关联分析过程。其核心要义在于依托光学系统的焦距、视场角等核心参数,建立视场角与物/像尺度的几何关联,再结合具体场景的换算公式完成精准计算。
在光学系统的设计、检测与性能评估中,精准完成空间频率单位的换算,是实现光学系统细节分辨能力综合评价的基础,同时也是匹配光学系统各组件性能的关键环节——如相机镜头与传感器的分辨率匹配、望远镜视场性能与成像面的适配等。唯有严格遵循换算逻辑,把控近似条件,匹配对应系统参数,才能保证换算结果的准确性,为光学系统的研发与应用提供可靠的理论支撑。
-

干涉条纹怎么判读——拿到干涉图先看什么、再看什么
一张干涉图拿到手,先看什么?
多数工程师拿到干涉图的第一反应是:PV多少?RMS多少?合格不合格?
但这两个数字回答的是"好不好",不是"为什么好/不好"。你真正需要的不是一张成绩单,是一张体检报告——每条纹的弯曲方向、间距变化、对称性,藏着比PV更关键的信息。2026-07-17
-

光学检测设备选型总览:不同规模光学工厂的配置思路
一家初创光学工坊可能只需要一台球径仪和一台定心仪,而一家年产千万片镜头的工厂需要覆盖从原材料检测到成品MTF的全自动检测线。光学检测设备的选型不是"买最贵的"或者"买最便宜的",而是根据产品精度、产量规模和成本预算在三者之间找到最优平衡点。本文从入门级、产线级、研发级和计量级四个层次,为不同规模的光学制造企业提供检测设备的选型参考。
2026-07-16
-
偏振光学元件的检测:消光比、偏振度与相位延迟的测量原理
在激光通信、量子光学和偏振成像系统中,偏振光学元件的品质往往以"消光比"来评价——一个消光比为10⁶:1(60dB)的偏振分光器,意味着p偏振光可以"几乎完美地透过",而s偏振光被"几乎完全抑制"。但当这个分光器在系统中因为微小的装调偏差退化到10³:1时,系统性能的劣化可能比MTF下降10%更严重。本文从消光比、偏振度和相位延迟(波片检测)三个核心参数出发,系统介绍偏振光学元件的检测方法。
2026-07-16
-

亚纳米的较量:半导体对位计量从光刻走向先进封装
SEMICON China 2026上传递出一个清晰的信号:先进封装已从"补位技术"跃升为算力竞争的核心战场。2.5D/3D堆叠、混合键合、CPO硅光互连——这些技术的共同命门只有一个字:准。
2026-07-16
-
光学膜层的非接触厚度测量:从椭偏仪到反射光谱法的技术选择
一片镜片上的增透膜厚度标注为"SiO₂ 80nm±2nm"。80nm约等于400个硅原子的直径——检测这样厚度的膜层,接触式测厚仪(探针)已无法使用:探针的接触力会直接穿透膜层或造成不可逆的损伤。光学膜层的厚度测量几乎完全依赖非接触光学方法。本文从椭偏仪和反射/透射光谱法两种主流方案出发,对比其物理原理、精度边界和适用场景,为膜层检测的选型提供参考。
2026-07-15







