
工程光路中的关键抉择:道威棱镜与五角棱镜的科学选型指南
在光学工程系统中,光路的旋转与折叠是核心基础需求,看似简单的“改变光束方向”或“调整图像姿态”,实则对器件选型有着严苛要求。道威棱镜(DovePrism)与五角棱镜(Pentaprism)作为该领域常用器件,常被从业者混淆使用,但二者的功能定位、特性表现及适用场景存在本质差异——选错器件不仅会导致光路调试困难,更可能引发系统精度下滑、稳定性失效等严重问题,造成高昂的工程代价。本文将从专业角度解析两种棱镜的核心特性、适用边界与选型逻辑,为工程实践提供科学参考。
一、核心特性对比:功能定位决定应用边界
道威棱镜与五角棱镜的本质区别,在于其设计目标与物理特性的差异,这种差异直接决定了它们在工程中的应用场景。以下从关键技术维度进行系统对比:
| 技术维度 | 道威棱镜(Dove Prism) | 五角棱镜(Pentaprism) |
|---|---|---|
| 核心功能 | 实现光束像绕光轴旋转,旋转角度为棱镜机械旋转角的 2 倍 | 固定偏折光束传播方向,不改变图像旋转状态 |
| 入射角敏感性 | 极高,微小入射角度偏差即引入显著像差 | 极低,入射角度波动对出射方向影响可忽略 |
| 旋转依赖性 | 与棱镜自身旋转角强相关,呈 2 倍比例关系 | 与棱镜旋转状态无关,出射方向保持稳定 |
| 系统稳定性 | 中等偏低,易受装调误差、温变影响 | 极高,抗干扰能力强,长期运行稳定性优异 |
| 像差控制 | 对称光路条件下像差可控,非对称场景劣化明显 | 无需依赖光路对称性,像差表现稳定 |
| 物理特性 | 体积相对小巧,光路长度灵活 | 体积通常更大,光路长度固定不可调 |
| 典型应用 | 图像旋转补偿、光学扫描系统、同轴角度映射 | 精密折光、定向传输、光路折叠、测量定位系统、激光加工与测距 |
从本质上看,道威棱镜的核心价值在于“动态旋转调节”,而五角棱镜的核心优势在于“静态方向稳定”,二者不存在功能互换性。
二、深度解析:两种棱镜的工作原理与工程代价
(一)道威棱镜:动态旋转场景的专属选择
道威棱镜的设计核心是利用光的折射与反射规律,实现输出像与棱镜机械旋转的联动效应——当棱镜绕光轴旋转θ角时,出射图像会同步旋转2θ角,这一特性使其成为动态旋转场景的理想器件。在对称光路设计中,道威棱镜可有效控制像差,因此广泛应用于需要实时调整图像姿态的场景,如光学扫描设备中的图像校准、同轴系统的角度映射等。
但这一特性也带来了显著的工程代价:其一,道威棱镜对入射角极为敏感,即使微小的入射偏心或角度偏差,都可能导致像差急剧增大,影响成像质量;其二,其稳定性依赖严格的光路校准与机械固定,在非共轴系统或发散光场景中,性能会大幅劣化;其三,该棱镜的核心价值仅体现在“旋转功能”上,若用于单纯的光路折光,相当于浪费其设计优势,且会引入不必要的调试难度。
(二)五角棱镜:精密稳定场景的“方向保险器”
五角棱镜的独特价值源于其“反直觉”的光学特性:无论入射角度发生微小波动,还是棱镜自身出现机械旋转,其出射光的传播方向始终保持稳定。这一特性源于其内部精密的反射光路设计,使得光束经过两次反射后,出射方向与入射方向形成固定夹角(通常为90°),且不受外部扰动影响。
这一特性使其在工程中成为“稳定性优先”场景的首选:安装误差容忍度高,无需复杂的校准流程即可满足精度要求;机械转动不会引入角度漂移,适用于长期稳定运行的系统;光路折光效果稳定,可作为精密对准的基准器件。但其局限性同样明确:无法实现图像旋转功能,若工程需求包含动态旋转,五角棱镜完全无法满足;光路长度固定,限制了系统的结构设计灵活性;体积通常大于道威棱镜,对安装空间有一定要求。

三、工程误区警示:错误选型的严重后果
在实际工程实践中,因对两种棱镜的特性认知不足导致的选型错误屡见不鲜,常见误区及后果如下:
1.用道威棱镜追求稳定折光:道威棱镜对入射角和机械固定的高敏感性,会导致系统对准难度激增,且受温度变化影响明显(温漂显著),最终导致光路稳定性失效;
2.用五角棱镜实现连续旋转:五角棱镜的出射方向与自身旋转无关,完全不具备图像旋转功能,此类选型会直接导致核心功能无法实现;
3.忽略机械装调方式:两种棱镜对装调精度的要求不同(道威棱镜需严格校准入射角,五角棱镜需保证固定稳定性),若装调方式不符合器件特性,会导致光学指标大幅劣化;
4.仅以“折射角度”为选型依据:两种棱镜的核心差异在于“旋转功能”与“稳定性”,而非单纯的折射角度,仅以此为判断标准,必然导致器件选错。
值得注意的是,多数“调不稳”“功能失效”的光学系统,并非源于加工精度或算法缺陷,而是从光路功能定义阶段就出现了选型错误。
四、科学选型方法:两步决策法与架构原则
要实现两种棱镜的精准选型,无需复杂的理论计算,只需围绕工程核心需求进行判断,具体可遵循以下两步决策法:
第一步:明确核心功能需求——是“旋转图像”还是“仅改变光束传播方向”?若需求是动态调整图像姿态(如扫描系统中的图像补偿),则道威棱镜是唯一选择;若需求是固定偏折光路、保证传播方向稳定(如精密测量中的光路折叠),则五角棱镜为最优解。
第二步:明确系统运行状态——是“动态旋转运行”还是“长期稳定运行”?道威棱镜适配动态场景,其旋转特性可满足实时调节需求;五角棱镜适配静态场景,其稳定性可保障系统长期运行的精度一致性。
若工程需求同时包含“图像旋转”与“稳定折光”,则说明系统架构设计存在矛盾,此时不应试图通过器件选型妥协,而需重新优化光路架构,避免功能冲突。
五、工程经验总结
在光学工程领域,器件选型的核心逻辑是“功能匹配优先”——道威棱镜与五角棱镜并非“性能优劣”的对比,而是“功能适配”的选择。光学系统的隐性成本,从来不是器件本身的采购费用,而是选错器件后产生的调试工时损耗、系统精度返工、长期稳定性隐患等间接代价。
因此,在光路设计初期,需摒弃“仅看折射角度”“追求器件通用”的误区,聚焦核心需求,通过“功能定位+运行状态”的两步决策法精准选型:动态旋转选道威棱镜,稳定折光选五角棱镜。唯有如此,才能从源头保障光学系统的精度与稳定性,降低工程总成本。
总之,道威棱镜与五角棱镜的选型本质,是对光学系统核心需求的精准认知——明确“要旋转”还是“要稳定”,才能做出最科学的工程决策,让每一个光学器件都发挥其设计初衷的核心价值。
-
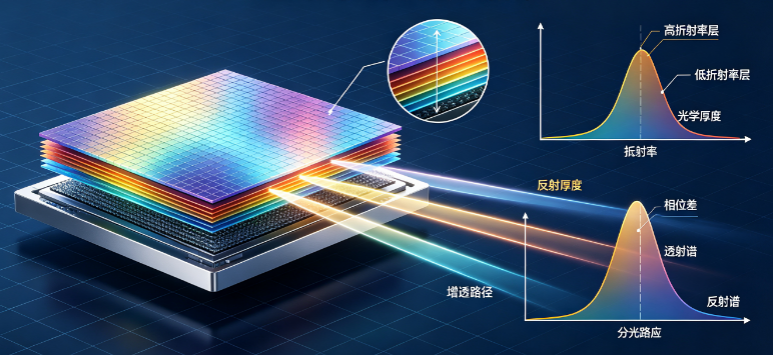
光学薄膜膜系设计基础:增透膜、反射膜与分光膜的原理与工程选择
一片未经镀膜的冕牌玻璃表面,仅因菲涅耳反射就会损失约4%的入射光。经过6~8片镜片的镜头,累积光损失可达25%~35%。光学薄膜的核心任务,就是通过精确控制纳米级厚度的介质膜层,将光的反射、透射和吸收特性调节到设计目标。本文从薄膜光学的基本原理出发,系统介绍增透膜、高反射膜和分光膜三类最常用膜系的设计思路和工程考量。
2026-07-08
-

光学元件精密清洁与维护:从实验室到产线的操作规范
一颗直径5μm的灰尘颗粒,落在干涉仪参考面上,产生的散射信号足以让λ/50的精度退化到λ/10。在精密光学领域,清洁不是"擦干净就行"的保洁工作——它是保护光学表面和测量精度的一道严谨工序。本文从污染物类型、清洁剂选择、操作手法和设备维护四个维度,系统梳理光学元件的精密清洁规范。
2026-07-08
-

ImageMaster® 系列全景:从产线快检到实验室高精度,MTF 测量怎么选
今天就跳过理论推导,直接从产品功能出发,把 ImageMaster® 整个系列理一遍:每台设备能测什么、测多快、精度多少、适合谁用。看完这篇,选型基本心里有数。
2026-07-08
-

激光损伤阈值(LIDT)测试技术:ISO 21254标准解读与工程实践
高功率激光系统中的光学元件,承受着每平方厘米数焦耳至数千焦耳的能量密度。一片反射镜的膜层在若干次脉冲后出现针孔——系统功率被迫降级,甚至整机返修。激光诱导损伤阈值(LIDT)是决定光学元件"能承受多强的光而不坏"的核心参数。本文从损伤机理、ISO 21254标准测试方法和工程选型三个维度,系统介绍LIDT测试的技术体系。
2026-07-07
-

DUV vs EUV光刻物镜装调:两种技术路线的精度博弈
DUV 和 EUV,两代光刻技术的核心光学系统,分别在 193nm 和 13.5nm 波长下工作。它们的装调精度要求相差的不是百分比,而是数量级。更关键的是,它们的装调方法论本身就是两套完全不同的逻辑。
2026-07-07







