
如何利用TriAngle实现高精度平面度测量?
一、TriAngle测量平面度的核心原理
TriAngle 自准直仪基于激光三角测量法与多测点拟合算法,通过激光发射器向被测平面发射高精度激光束,激光经平面反射后被高分辨率图像传感器接收,形成位移信号。系统通过计算激光发射与接收的角度偏差,结合三角几何关系,精准获取被测点的三维坐标数据;再对多个采样点的坐标信息进行最小二乘拟合、平面度误差评定(如最大与最小点差值、平面度偏差值),最终输出被测平面的平面度参数。
核心优势:激光三角测量法具备非接触测量特性,可避免对精密平面(如光学镜片、精密机械零件表面)的划伤,同时兼顾微米级测量精度与高效数据采集能力。

二、TriAngle测量平面度的详细操作流程
1.测量前准备
设备校准:使用标准平面样板(平面度误差≤0.1μm)进行系统校准,输入样板参数,确保激光发射强度、传感器灵敏度、坐标基准的准确性;
工件预处理:清洁被测平面,去除油污、灰尘等杂质(避免反射干扰),根据工件尺寸调整测量台夹具,确保工件稳定且被测面处于测量范围内;
环境控制:保持测量环境温度(20±2℃)、湿度(40%60%)稳定,避免温度变化导致工件变形或激光传播误差。
2.参数设置
采样参数:设定采样点密度(如50×50点矩阵,根据平面尺寸调整,尺寸越大需越高密度采样)、测量速度(精密测量选低速模式,效率优先可选高速模式);
评定标准:选择平面度误差评定方法(如最小区域法、最小二乘法、对角线法,按行业标准或工件要求确定);
坐标设定:建立测量坐标系(如以工件边缘两点为基准轴,或采用系统默认全局坐标系)。
3.数据采集与处理
自动扫描:启动测量后,TriAngle测量头按预设路径(如栅格扫描、螺旋扫描)自动采集全平面测点坐标,实时传输至控制系统;
数据筛选:系统自动剔除异常点(如因表面杂质导致的反射异常数据),保留有效测点信息;
误差计算:通过拟合算法生成理想平面,计算各测点与理想平面的偏差值,统计最大正偏差、最大负偏差及平面度误差(平面度=最大偏差最小偏差)。
4.结果输出与分析
输出形式:生成平面度误差数值报告(含具体偏差值、合格判定结果)、三维可视化云图(直观展示平面高低起伏)、测点偏差分布表格;
数据导出:支持导出CSV、PDF格式文件,便于后续质量追溯或CAD软件二次分析。

三、测量精度影响因素与优化方案
四、TriAngle在不同场景下的平面度测量应用
1.光学元件领域
应用对象:光学镜片(凸透镜/凹透镜镜面)、棱镜表面、光学窗口片;
测量要求:平面度误差≤1μm(高精度光学元件),采样点密度≥50×50点;
优势:非接触测量避免划伤光学表面,激光穿透力弱(对透明元件无影响),适合批量检测。
2.精密机械制造
应用对象:机床工作台面、发动机缸体平面、精密夹具定位面;
测量要求:平面度误差≤5μm(关键部件),需覆盖全工作面采样;
优势:测量速度快(单平面测量≤5分钟),可与MES系统对接,实现质量实时监控。
3.电子半导体领域
应用对象:半导体晶圆表面、PCB基板、显示屏玻璃;
测量要求:平面度误差≤2μm,采样点需避开芯片焊点区域;
优势:高分辨率传感器可捕捉微观凸起/凹陷,适配小尺寸、高精密工件测量。
五、操作注意事项与维护要点
1.测量时避免激光直射人眼,需佩戴专用激光防护眼镜;
2.定期清洁激光发射器与传感器镜头(用无水乙醇擦拭,避免刮伤镜片);
3.夹具夹持工件时力度适中,避免工件变形导致测量误差;
4.长期不使用时,需关闭激光电源,将设备置于干燥、防尘环境中;
5.若测量结果出现异常(如偏差值突变),需重新校准设备并检查工件表面状态。
六、总结
TriAngle凭借激光三角测量的非接触优势与高精度数据处理能力,已成为光学工程、精密制造等领域平面度测量的核心设备。通过规范操作流程、控制环境干扰、定期校准维护,可实现微米级甚至纳米级的平面度测量精度,满足不同场景下精密工件的质量检测需求。其直观的结果输出与高效的测量效率,不仅能提升检测准确性,还能助力生产线质量管控的数字化升级。
-

激光损伤阈值(LIDT)测试技术:ISO 21254标准解读与工程实践
高功率激光系统中的光学元件,承受着每平方厘米数焦耳至数千焦耳的能量密度。一片反射镜的膜层在若干次脉冲后出现针孔——系统功率被迫降级,甚至整机返修。激光诱导损伤阈值(LIDT)是决定光学元件"能承受多强的光而不坏"的核心参数。本文从损伤机理、ISO 21254标准测试方法和工程选型三个维度,系统介绍LIDT测试的技术体系。
2026-07-07
-

DUV vs EUV光刻物镜装调:两种技术路线的精度博弈
DUV 和 EUV,两代光刻技术的核心光学系统,分别在 193nm 和 13.5nm 波长下工作。它们的装调精度要求相差的不是百分比,而是数量级。更关键的是,它们的装调方法论本身就是两套完全不同的逻辑。
2026-07-07
-
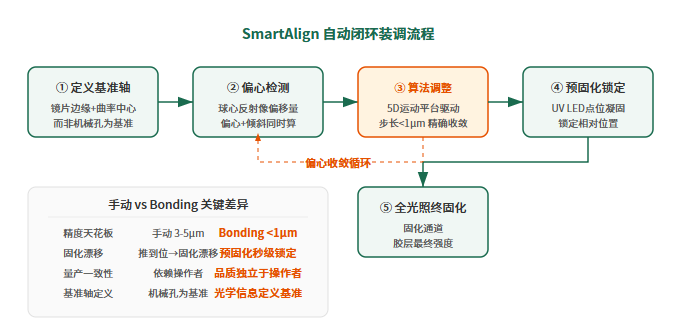
OptiCentric® Bonding 胶合装调系统,从"手感对准"到"算法锁定"
手动胶合时代,师傅的手感是精度上限——推到位靠经验,固化漂移靠运气,量产一致性靠祈祷。Bonding系统把这三件事交给算法:SmartAlign定义正确的轴、算法驱动精确的调整、梯度固化锁住精确的结果。
2026-07-07
-

精密光学检测实验室建设指南:从环境控制到设备布局的工程实践
一台精度λ/50的干涉仪放在一间没有温控的普通房间里,实测精度可能退化到λ/10以下。精密光学检测设备不是"买来就能用"的——它们的精度发挥严重依赖环境条件。本文从温度、湿度、振动、洁净度和设备布局五个维度,系统梳理精密光学检测实验室的建设要求和工程实践,为光学制造企业在规划检测实验室时提供可参考的技术框架。
2026-07-06
-

红外热像仪镜头选型指南:短焦、中焦与长焦的参数原理及场景适配
在红外热像仪的选型过程中,用户通常优先关注探测器分辨率参数,如384×288、640×512、1280×1024等指标。但在实际应用场景中,镜头焦距的适配性往往直接决定最终观测效果:同一台640×512分辨率的热像仪,搭配短焦镜头可实现大范围场景覆盖,但远距离小目标仅能占据少量像素;搭配长焦镜头可放大远处目标细节,但视场范围大幅收窄,搜索效率下降;中焦镜头虽兼顾二者特性,却未必适配所有特定场景。
2026-07-06







