
突破黑夜视野局限!东南大学紧凑型超构相机:120°超广角+智能算法,让暗区细节“显形”
深夜的城市道路上,自动驾驶汽车的摄像头正面临两难:车灯强光让近处画面惨白过曝,人行道阴影里却连行人轮廓都模糊不清;高空的微型侦察无人机想覆盖更广区域,传统广角镜头的bulky体积又成了“卡脖子”的难题。这两个场景指向同一个技术痛点——如何在紧凑设备中,同时实现广角视野与低光清晰成像?如今,东南大学与紫金山实验室的陈绩教授、张在琛研究团队,用一款“软硬件协同”的紧凑型超构相机,给出了令人眼前一亮的解决方案。
痛点:超构透镜的“广角暗区困境”
超构透镜本是解决“镜头小型化”的利器——它薄如平面,无需传统广角镜头的多片曲面透镜堆叠,能大幅压缩设备体积。但它有个绕不开的物理瓶颈:大角度入射光强衰减。
简单说,当光线斜着进入超构透镜(比如画面边缘区域),有效通光面积会像“余弦函数”一样急剧缩小,导致画面边缘像被“按了暗键”,亮度断崖式下跌;再遇上夜间非均匀光照(如路灯、车灯),亮区过曝、暗区失细节的问题会更严重——要么提亮暗区却让噪点爆炸,要么压制亮区却让边缘更暗,始终难以兼顾。
破局:“分而治之”的硬件+“逐像素精修”的软件
团队没有孤立解决某一个问题,而是打造了“硬件筑基+软件升维”的全链路方案,相当于给超构相机装上了“精准分工的眼睛”和“智能修图的大脑”。
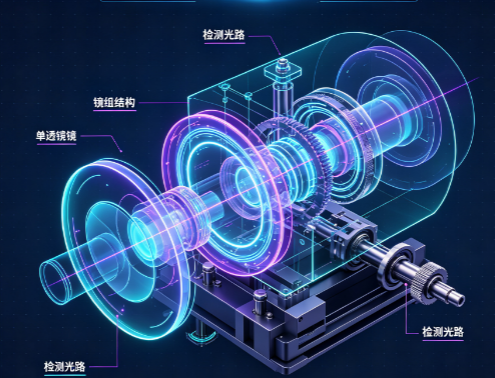
硬件:三个超构透镜,拼出120°超广角
传统超构透镜试图用“单个镜片扛下所有视场”,结果顾此失彼。团队反其道而行之,设计了线性排列的三合一超构透镜阵列,让每个镜片“各司其职”:
左侧透镜:负责捕捉60°~20°的左半视野;
中间透镜:聚焦20°~+20°的中心视野(通过相位优化保证清晰度);
右侧透镜:覆盖+20°~+60°的右半视野(叠加倾斜相位适配大角度光线)。
三个镜片捕捉的子图像无缝拼接后,就能得到完整的120°水平超广角画面,既保留了超构透镜的紧凑性,又避免了单个镜片的“边缘暗化”问题。
软件:MetaLightEnhance算法,让暗区“显形”
硬件解决了“看得宽”,软件则要解决“看得清”——尤其是夜间复杂光照场景。团队开发的MetaLightEnhance智能算法,不是简单的“全局提亮”,而是像经验丰富的后期大师一样“逐像素精修”。
它的核心逻辑是“迭代增强”:
1.初始曲线:先用三阶多项式曲线打下基础,确定亮度调整的大致方向;
2.智能参数图:通过一个叫“MLEN”的深度神经网络(类似UNet结构,还加了小波变换模块),为每帧图像生成专属“参数图”——这个图能精准识别哪里是亮区、哪里是暗区,甚至能区分“车灯强光”和“行人轮廓”;
3.迭代优化:把上一轮处理的图像当输入,重复“生成参数调整亮度”的过程,实验证明迭代6次效果最佳——既能把暗区的行人、自行车轮廓“拉亮”,又不会让亮区的车牌、车灯过曝。
小波变换模块是关键“加分项”:它能捕捉图像不同尺度的细节,比如远处卡车的轮廓(低频信息)和近处路面的纹理(高频信息),让算法调整时更“有针对性”,不会把噪点误当成细节提亮。

实测:从白昼到黑夜,画质碾压传统方案
团队用实验数据证明了技术实力,无论是正常光照还是极端黑夜,这款超构相机的表现都远超传统方式。
白昼场景:边缘亮度“逆袭”
未处理的超构相机图像,边缘区域明显偏暗;经过MetaLightEnhance算法优化后,整个画面亮度分布均匀,灰度直方图更接近真实场景——比如远处的建筑轮廓、近处的路面纹理,都能清晰呈现。
夜间场景:暗区细节“不丢失”
原始图像:暗区(人行道、远处车辆)完全“隐身”,只有车灯附近可见;
简单增曝:暗区是亮了,但噪点爆炸,车灯区域惨白一片,车牌信息全丢;
算法增强:暗区的行人、自行车轮廓清晰可见,亮区的车牌数字也能辨认,动态范围和信噪比大幅提升。
更关键的是量化数据:在衡量图像质量的PSNR(峰值信噪比)和SSIM(结构相似性)指标上,MetaLightEnhance算法表现最佳——PSNR达14.41(远超简单增曝的7.47),SSIM达0.69(是原始图像的2倍多)。把处理后的图像输入YOLO目标检测网络,漏检、误检率也大幅下降,能准确识别汽车、行人、自行车等关键目标。
未来:从“看得宽”到“看得全”,还有这些新可能
这项技术最核心的价值,在于它对“尺寸、重量、功耗(SWaP)”的极致优化——这让它在微型设备中极具潜力:比如可穿戴智能眼镜(需要广角低光视野)、微型无人机(体积受限但要覆盖广域)、紧凑型车载传感器(装在车侧不占空间)。
但科研团队也提出了三个值得探索的方向,未来或许会有更大突破:
1.从1D到2D:目前120°是水平视场,垂直视场只有40°。如果把线性阵列改成2D阵列,怎么在保持紧凑的同时,实现“水平+垂直”双广角?
2.从单色到彩色:现在的相机只能拍黑白画面,要实现全彩,是叠多层超构透镜(对应RGB三色),还是靠算法“补色”?哪种方案更省体积、更少噪点?
3.软硬件边界:全黑环境下,算法什么时候会“失灵”?届时是不是得换更灵敏的传感器(比如SPAD传感器)?软硬件的“协作极限”在哪里?
超构光学+计算成像,打开未来“视界”
东南大学的这款超构相机,不只是一次“镜头升级”,更是超构光学与计算成像结合的典范。它没有回避物理规律的限制,而是用“硬件分工+软件智能”的思路,打破了“广角就难低光,紧凑就丢细节”的固有印象。
未来,当这项技术解决了全彩、2D广角的问题,我们或许能看到:智能眼镜能在深夜看清拐角的行人,微型机器人能在昏暗管道里看清全貌,自动驾驶汽车的“peripheralvision”(周边视野)不再有暗区盲区。而这些突破,或许就藏在科研团队下一次的实验室创新里。
-

光学冷加工全流程:从毛坯到精密镜片的制造工艺
一片直径50mm的精密球面透镜,从一块粗糙的玻璃毛坯到面形精度λ/10、表面粗糙度Ra<1nm的成品,需要经历十余道工序。每一道工序都有特定的设备、工艺参数和检测标准,任何环节的失控都会在最终元件上留下不可逆的缺陷。本文系统梳理光学冷加工从铣磨、精磨、抛光到定心磨边的完整工艺流程,为光学制造从业者提供⼀份全景式的工艺参考。
2026-07-09
-

OptiCentric® IR — 红外镜头定心装调:从 3.39μm 到 10.5μm,让红外光学"对得齐、装得稳"
红外镜头、夜视系统、热成像模组……这些设备里跑的,可能是 3μm、5μm,甚至 10μm 量级的光波。面对这种波段,常规可见光定心仪压根看不到信号——镜片要么把光吃掉了,要么把光反射走了,自准直仪的 CCD 上只剩一片漆黑。OptiCentric® IR 红外偏心仪就是为了解决"看不见"这个根本问题而生的。
2026-07-09
-
精密光学装配技术:从单透镜到系统的装调方法与精度控制
一片面形精度λ/20、偏心<0.2μm的完美透镜,装入镜筒后,如果装配误差为5μm——系统MTF劣化可能超过自身光学设计的允差。精密光学装配不是简单的"把镜片放进去拧紧",而是一项以微米为单位的系统工程。本文从装调基准选择、胶合/压装/螺纹装配三种方式、以及装调过程中的在线检测三个维度,系统介绍精密光学的装配技术。
2026-07-09
-
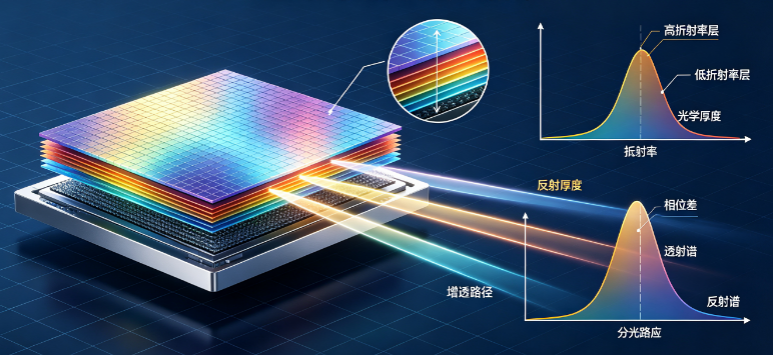
光学薄膜膜系设计基础:增透膜、反射膜与分光膜的原理与工程选择
一片未经镀膜的冕牌玻璃表面,仅因菲涅耳反射就会损失约4%的入射光。经过6~8片镜片的镜头,累积光损失可达25%~35%。光学薄膜的核心任务,就是通过精确控制纳米级厚度的介质膜层,将光的反射、透射和吸收特性调节到设计目标。本文从薄膜光学的基本原理出发,系统介绍增透膜、高反射膜和分光膜三类最常用膜系的设计思路和工程考量。
2026-07-08
-

光学元件精密清洁与维护:从实验室到产线的操作规范
一颗直径5μm的灰尘颗粒,落在干涉仪参考面上,产生的散射信号足以让λ/50的精度退化到λ/10。在精密光学领域,清洁不是"擦干净就行"的保洁工作——它是保护光学表面和测量精度的一道严谨工序。本文从污染物类型、清洁剂选择、操作手法和设备维护四个维度,系统梳理光学元件的精密清洁规范。
2026-07-08







