
组合透镜的等效焦距,看懂复杂镜片的“简化密码”
不管是手机镜头里叠放的小镜片,还是近视眼镜的渐进多焦点设计,甚至显微镜能放大微小物体的核心结构,靠的都不是单个透镜——而是多个透镜组合而成的“团队”。要理解这个“团队”的成像能力,关键就在于“等效焦距”:它能把多个透镜的复杂作用,简化成一个“虚拟单透镜”的效果,让我们轻松判断它能“看得多远”“照得多广”。其中,由两个透镜(或简单镜片组)构成的“双光组”是最基础的组合形式,搞懂它,就能明白所有复杂透镜系统的入门逻辑。
一、双光组:两个镜片的“合作基础”
要搞清楚等效焦距,得先知道两个镜片“合作”时的关键信息,主要分三类:镜片本身的特性、镜片之间的位置关系。
1.每个镜片的“基本能力”
焦距:每个镜片都有“会聚”或“发散”光线的能力,这个能力的强弱用“焦距”表示。比如放大镜能会聚光线,它的焦距是正数;近视眼镜能发散光线,焦距是负数。而且每个镜片都有“正面”和“反面”的区别,所以会有“物方焦距”(光线从正面入射时的能力)和“像方焦距”(光线从反面入射时的能力),但日常场景里,我们不用纠结这么细,知道它“会聚还是发散”“能力强不强”就行。
折射率:简单说,就是光在镜片里传播的速度和在空气里的差异。比如玻璃镜片的折射率比树脂镜片高,光线在里面“走得慢”,折射效果也更明显。重要的是,两个镜片组合时,它们之间通常是空气,所以第一个镜片的“出光侧”和第二个镜片的“入光侧”介质一致(都是空气),光线不会在中间额外“拐弯”,这是它们能稳定合作的前提。
2.两个镜片的“位置关系”
两个镜片离得多远、焦点对得准不准,直接影响最终的成像效果,核心看两个距离:
光学间隔:简单理解就是“第一个镜片的出光焦点”和“第二个镜片的入光焦点”之间的距离。它不看镜片本身多大,只看两个焦点的“对齐程度”——比如两个焦点离得近,说明光线能顺畅传递;离得远,光线可能会“跑偏”。
空间距离:就是两个镜片“实际安装的距离”,比如手机镜头里两个镜片之间的物理间隙,这个距离是能直接测量的,也是工程师组装时需要精准控制的。
这两个距离不是孤立的——光学间隔变了,空间距离也要跟着调;反过来,调整空间距离,也会影响两个焦点的相对位置,它们相互关联,共同决定组合后的效果。
二、等效焦距怎么来?从光线走径看清楚
等效焦距的本质,就是找到一个“虚拟镜片”,让它的成像效果和两个真实镜片的组合完全一样。要找到这个“虚拟镜片”,我们只需要追踪两条特殊的光线,就能确定它的关键位置。
1.找“虚拟镜片”的出光焦点和主平面
我们先从左往右射一条“平行于镜头中心轴”的光线(比如阳光平行照射镜头),这条光线会经历两步折射:
1.过第一个镜片:平行于中心轴的光线,经过第一个镜片后,一定会朝着它的“出光焦点”走——就像阳光通过放大镜后会汇聚到一个点(焦点)一样。
2.过第二个镜片:这条朝着第一个镜片焦点走的光线,接着会射到第二个镜片上。此时,根据镜片的特性,我们能画出它经过第二个镜片后的折射方向。这条折射后的光线,最终会和镜头中心轴交于一个点——这个点就是两个镜片组合后的“出光焦点”。
同时,我们把最初的平行光线往前延长,再把经过第二个镜片后的折射光线往后延长,这两条延长线会交于一点。这个点所在的、垂直于中心轴的平面,就是“虚拟镜片”的“出光主平面”;主平面和中心轴的交点,就是“出光主点”。从主点到出光焦点的距离,就是组合后的“出光等效焦距”——如果这个焦距是负数,说明组合后的效果是发散光线(比如有些近视眼镜的组合)。
2.找“虚拟镜片”的入光焦点和主平面
根据“光路可逆”的道理(光线可以从左往右走,也可以从右往左走),我们从右往左射一条平行于中心轴的光线,重复上面的步骤:
这条光线经过第二个镜片后,会朝着它的“入光焦点”走;
再经过第一个镜片折射后,最终会和中心轴交于一个点——这就是组合后的“入光焦点”;
同样延长入射光线和折射光线,找到它们的交点,确定“入光主平面”和“入光主点”;
从入光主点到入光焦点的距离,就是“入光等效焦距”——如果是正数,说明组合后的入光侧有会聚能力。
三、不用公式也能懂:等效焦距的关键影响因素
虽然之前有专业公式,但我们不用记,只要知道三个关键影响就行:
1.单个镜片的能力:如果两个镜片都是会聚型(焦距正),组合后大概率也是会聚的;如果一个会聚、一个发散,就要看谁的能力更强——比如会聚能力强,组合后还是会聚;发散能力强,就变成发散的。
2.镜片之间的距离:哪怕两个都是会聚镜片,要是离得特别远,组合后可能反而变成发散的(比如有些长焦镜头调整间距后能变广角);如果离得近,会聚能力可能会更强。
3.光焦度:更直观的“能力指标”:我们平时说的眼镜度数,其实就是“光焦度”(度数越高,光焦度越大)。两个镜片组合后的光焦度,不是简单把两个度数相加——还要看它们之间的距离:距离越远,组合后的光焦度可能越小(能力越弱);距离越近,光焦度可能越接近两者之和。比如一副渐进多焦点眼镜,不同区域的镜片光焦度不同,间距也经过设计,所以能同时满足看远、看近的需求。
四、从双光组到多光组:复杂系统的简化思路
如果有三个、四个甚至更多镜片(比如单反相机的镜头有十几片镜片),也不用怕——我们可以“两两组合”:
1.先把前两个镜片算成一个“等效虚拟镜片”,知道它的焦距和主平面;
2.再把这个“虚拟镜片”和第三个镜片组合,算出新的等效焦距;
3.以此类推,直到把所有镜片都组合完,最后得到整个复杂系统的等效焦距。
现在工程师设计镜头时,不用手动算这么多步骤,靠专业软件(比如Zemax、CodeV)输入每个镜片的参数和间距,就能自动算出等效焦距和成像效果,既快又准。
五、总结:等效焦距的核心价值
组合透镜的等效焦距,其实就是给复杂的镜片“团队”找一个“代言人”——不用再逐个分析每个镜片的作用,只要看这个“虚拟代言人”的焦距,就知道整个系统能“看得多远”“成像效果怎么样”。小到手机镜头的轻薄设计,大到天文望远镜的深空观测,甚至我们戴的近视眼镜、老花镜,背后都离不开等效焦距的原理。理解它,就看懂了光学设计的“简化密码”。
-

VR/AR光学检测全景指南:从光波导到整机成像质量的技术解析与设备方案
随着Apple Vision Pro、Meta Quest系列等产品的持续迭代,VR(虚拟现实)和AR(增强现实)已从概念验证阶段迈入规模化量产。然而,VR/AR光学系统的复杂性远超传统成像镜头——菲涅尔透镜的杂散光控制、光波导的衍射效率均匀性、Pancake方案的偏振性能,每一项都对光学检测提出了全新的技术挑战。本文系统梳理VR/AR光学检测的核心技术难点、检测参数体系以及适配不同产品形态的设备方案,为VR/AR光学制造商和研发机构提供实用的参考指南。
2026-07-24
-

手机镜头与车载摄像头MTF检测:从研发到量产的光学质量保障方案
在智能手机多摄化、车载摄像头智能化的行业趋势下,光学镜头的成像质量直接决定了终端产品的用户体验。MTF(调制传递函数)作为衡量光学系统成像性能的核心指标,已成为从镜头设计到量产交付全流程中不可或缺的检测环节。本文将围绕手机镜头和车载摄像头两大应用场景,系统介绍MTF检测的技术原理、关键挑战以及适配不同生产阶段的设备方案。
2026-07-24
-

万亿美元前夜:SEMICON China 2026给光学检测的5个信号
3 月底的 SEMICON China 2026 把"AI 算力"推到了 C 位。SEMI 中国总裁冯莉在开幕主题演讲里抛了一组数:2025 年全球半导体销售 7917 亿美元,2026 年预计 9750 亿,原定 2030 年才到的万亿美元节点,大概率要提前四年撞线。
2026-07-24
-
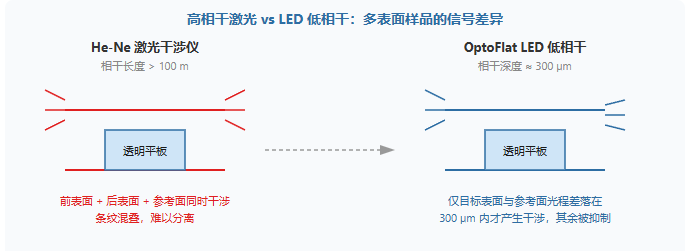
OptoFlat® 低相干干涉仪:平面光学件的“透明陷阱”怎么破
测一块双面抛光的晶圆或光学窗口,激光干涉仪的屏幕上经常飘出一团“鬼影”——前后表面同时出条纹,参考面和被测面互相抢戏,最后连 PV 值该信哪一面都说不清。OptoFlat 要做的,就是把这个“透明陷阱”关掉。
2026-07-23
-
光学窗口与平板件的平行度与透射波前检测
在激光防护窗口、红外热像仪保护窗和干涉仪分光镜中,一块看似"平整"的光学平板承载着不亚于透镜的精度要求——平行度3角秒、透射波前λ/10。平板光学件的检测与透镜检测有本质区别:没有光焦度意味着传统的焦距法和自准直法不再适用,而"平行度"和"透射波前"这两个参数也不像面形PV那样直观易懂。本文从平行度和透射波前两个核心指标出发,系统介绍平板光学件的精密检测方法。
2026-07-22







