
【光学资讯】543nm和602nm被动锁模全光纤绿/橙激光器中突发模式脉冲的产生
厦门大学罗正钱教授团队在可见光波段的锁模光纤激光器研究中取得了重要进展,成功实现了543nm和602nm被动锁模全光纤绿/橙激光器中的突发模式脉冲。该研究不仅推动了可见光波段锁模光纤激光器的技术发展,还为未来在生物医学成像、微机械加工等领域的应用提供了新的技术手段。
锁模光纤激光器在可见光波段(380-760nm)对于激光显示、光通信、生物医学、显微成像、医学治疗和科学研究等领域至关重要。尽管已有研究实现了可见光被动锁模光纤激光器,但全光纤配置的可见锁模光纤激光器主要局限于红色光谱带,限制了其在需要不同波长和小型化、紧凑性、稳定性要求高的应用场景中的应用。因此,探索可见光波长锁模全光纤激光器具有强烈的动力。
一、研究方法:
实验中使用了9字腔配置,包括光纤端面反射镜、增益光纤和光纤环形反射镜。460HP光纤环形镜不仅作为输出镜,还作为启动可见波长锁模的非线性光学环形镜。通过结合非线性光学环形镜和耗散四波混频效应辅助的腔内F-P滤波,实现了绿色和橙色被动锁模全光纤激光器中的突发模式脉冲。
二、实验装置
1.543nm激光器
1)泵浦源:使用商用450nmGaN激光二极管,输出功率为2W,通过一系列光学元件耦合到Ho3+:ZBLAN光纤中。
2)增益光纤:单包层Ho3+:ZBLAN光纤,纤芯直径7.5μm,数值孔径0.23μm。
3)过渡光纤:630HP光纤,纤芯直径3.5μm,数值孔径0.13,用于减少耦合损耗。
4)输出耦合器:使用630HP光纤的15:85光耦合器,反射率为51%,提取49%的腔内功率。
5)F-P滤波器:基于光纤-空气界面的菲涅耳反射,构建了一个自由光谱范围约为0.84pm(543nm处为854.40MHz)的弱F-P滤波器。
2.602nm激光器
1)泵浦源:使用商用443nmGaN激光二极管,输出功率为2W,通过一系列光学元件耦合到Pr3+/Yb3+:ZBLAN光纤中。
2)增益光纤:单包层Pr3+/Yb3+:ZBLAN光纤,纤芯直径2.8μm,数值孔径0.23μm。
3)输出耦合器:使用10:90耦合器的光纤环路反射镜,提供36%的反射率,提取64%的腔内功率。
4)F-P滤波器:基于光纤-空气界面的菲涅耳反射,构建了一个自由光谱范围约为0.76GHz的弱F-P滤波器。
三、实验结果
1.543nm激光器
连续波绿色激光:阈值约为260mW,当泵浦功率超过310mW时,突发模式锁模运行并自启动。
光谱特性:在335mW泵浦功率下,绿光锁模全光纤激光器的光谱带宽为0.13nm,中心波长固定为543.3nm。
2.脉冲特性:
脉冲串间脉冲:脉冲间隔为264.6ns,与腔的往返时间相匹配。脉冲串内脉冲:重复率为850.05MHz,脉冲持续时间为87ps。
泵浦功率影响:随着泵浦功率的增加,长脉冲串的脉冲持续时间从22.2ns逐渐增加到26.1ns,脉冲内脉冲持续时间从87ps增加到158ps。
3.602nm激光器
连续波橙色激光:当泵浦功率高于100mW时,激光器在602nm的连续波状态下工作,当泵浦功率达到180mW时,实现稳定的突发模式锁模。
光谱特性:锁模后的光谱带宽为0.21nm,基频为5.662MHz。
脉冲特性:
脉冲串间脉冲:脉冲间隔为175.3ns,与9字腔的基本重复率一致。
脉冲串内脉冲:重复率为758.70MHz,脉冲持续时间为80ps(受限于示波器带宽)。
泵浦功率影响:随着泵浦功率的增加,突发间脉冲的脉冲持续时间从11.6ns增加到19.8ns。
四、关键结论
突发模式脉冲:实验成功产生了543nm和602nm的突发模式脉冲,这些脉冲是一组以更低的重复率重复的高重复率脉冲,对于微机械加工和生物医学领域有广泛应用。
高重复率脉冲:通过结合非线性环形径和F-P滤波辅助的耗散四波混频效应,实现了可见光谱区高重复率脉冲的产生。
小型化和高性能:该系统不仅是向小型化可见光超快光纤激光器迈出的重要一步,还通过超快激光功率放大和色散管理,有望提高激光器在输出功率、脉冲持续时间和峰值功率方面的性能,未来可能应用于材料加工和生物医学领域。
这项研究不仅推动了可见光波段锁模光纤激光器的技术发展,还为未来在生物医学成像、微机械加工等领域的应用提供了新的技术手段。通过实现小型化和高性能的激光器,可以满足不同应用场景对激光器性能和尺寸的要求。
-

VR/AR光学检测全景指南:从光波导到整机成像质量的技术解析与设备方案
随着Apple Vision Pro、Meta Quest系列等产品的持续迭代,VR(虚拟现实)和AR(增强现实)已从概念验证阶段迈入规模化量产。然而,VR/AR光学系统的复杂性远超传统成像镜头——菲涅尔透镜的杂散光控制、光波导的衍射效率均匀性、Pancake方案的偏振性能,每一项都对光学检测提出了全新的技术挑战。本文系统梳理VR/AR光学检测的核心技术难点、检测参数体系以及适配不同产品形态的设备方案,为VR/AR光学制造商和研发机构提供实用的参考指南。
2026-07-24
-

手机镜头与车载摄像头MTF检测:从研发到量产的光学质量保障方案
在智能手机多摄化、车载摄像头智能化的行业趋势下,光学镜头的成像质量直接决定了终端产品的用户体验。MTF(调制传递函数)作为衡量光学系统成像性能的核心指标,已成为从镜头设计到量产交付全流程中不可或缺的检测环节。本文将围绕手机镜头和车载摄像头两大应用场景,系统介绍MTF检测的技术原理、关键挑战以及适配不同生产阶段的设备方案。
2026-07-24
-

万亿美元前夜:SEMICON China 2026给光学检测的5个信号
3 月底的 SEMICON China 2026 把"AI 算力"推到了 C 位。SEMI 中国总裁冯莉在开幕主题演讲里抛了一组数:2025 年全球半导体销售 7917 亿美元,2026 年预计 9750 亿,原定 2030 年才到的万亿美元节点,大概率要提前四年撞线。
2026-07-24
-
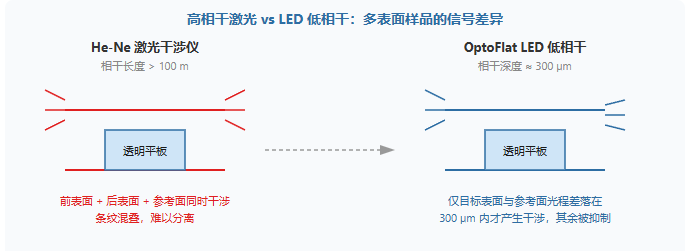
OptoFlat® 低相干干涉仪:平面光学件的“透明陷阱”怎么破
测一块双面抛光的晶圆或光学窗口,激光干涉仪的屏幕上经常飘出一团“鬼影”——前后表面同时出条纹,参考面和被测面互相抢戏,最后连 PV 值该信哪一面都说不清。OptoFlat 要做的,就是把这个“透明陷阱”关掉。
2026-07-23
-
光学窗口与平板件的平行度与透射波前检测
在激光防护窗口、红外热像仪保护窗和干涉仪分光镜中,一块看似"平整"的光学平板承载着不亚于透镜的精度要求——平行度3角秒、透射波前λ/10。平板光学件的检测与透镜检测有本质区别:没有光焦度意味着传统的焦距法和自准直法不再适用,而"平行度"和"透射波前"这两个参数也不像面形PV那样直观易懂。本文从平行度和透射波前两个核心指标出发,系统介绍平板光学件的精密检测方法。
2026-07-22







