
基于染料敏化太阳能电池的边缘AI设备研究获得突破性进展
在AI技术飞速发展的今天,其在预测心脏病、自然灾害和管道故障等紧急事件方面变得越来越重要。这些应用场景对数据的快速处理提出了更高的要求。东京理科大学(简称TUS)的研究团队在这一领域取得了突破性进展,开发了一种新型的物理储层计算(PRC)设备,该设备能够高效处理多尺度时间序列数据,为边缘AI领域带来了革命性的变革。
一、研究背景与挑战
传统的边缘AI设备在处理跨多个时间尺度的时间序列数据时面临挑战,这些数据广泛存在于监测基础设施、自然环境和医疗状况的信号中。为了克服这一难题,TUS的研究团队在TakashiIkuno教授的带领下,成功研发出了一种基于染料敏化太阳能电池的自供电光电光聚合人工突触,这种新型设备能够通过输入光强度控制时间常数,从而实现多尺度时间序列数据处理。
二、技术创新与特点
该设备模仿人类突触元素,有望实现与人类视觉系统相当的识别和实时处理能力。它基于染料敏化太阳能电池,采用方酸菁衍生物染料,将光输入、AI计算、模拟输出和电源功能集成于一体。这种集成化设计不仅提高了设备的效率,还降低了能耗。
研究人员通过激光测量了瞬态电压响应随光强度的变化,发现该装置表现出对光强度的突触可塑性,展现出成对脉冲促进和成对脉冲抑制等突触特征。这一发现表明,通过调整光强度,可以在时间序列数据处理任务中获得高计算性能,而与输入光脉冲宽度无关。
三、性能评估与实际应用
在实际应用测试中,当该设备作为PRC的储存层时,它能够以超过90%的准确率对人体动作(如弯曲、跳跃、跑步和行走)进行分类,且功耗仅为传统系统的1%。这一成果不仅展示了设备在处理不同时间尺度的时间序列数据方面的能力,还显著减少了相关的碳排放,对环境保护具有重要意义。
四、研究意义与未来展望
这项研究为边缘AI和神经形态计算中的高级应用提供了多时间尺度PRC的途径。基于染料敏化太阳能电池的突触装置有望加速开发用于不同时间尺度的节能边缘AI传感器,这些传感器可以应用于监控摄像头、汽车摄像头和健康监测等多个领域。
Ikuno教授预计,该设备将作为边缘AI光学传感器,可以连接到任何物体上,例如车载摄像头、车载计算机或人体,并且运行成本低廉。他说:“该设备可以用作低功耗识别人体运动的传感器,因此有可能为改善车辆功耗做出贡献。此外,它有望用作独立智能手表和医疗设备中的低功耗光学传感器,从而大大降低其成本,使其与当前医疗设备相当甚至更低。”
这项突破性研究的结果已经发表在《ACSAppliedMaterials&Interfaces》期刊上。
-

激光损伤阈值(LIDT)测试技术:ISO 21254标准解读与工程实践
高功率激光系统中的光学元件,承受着每平方厘米数焦耳至数千焦耳的能量密度。一片反射镜的膜层在若干次脉冲后出现针孔——系统功率被迫降级,甚至整机返修。激光诱导损伤阈值(LIDT)是决定光学元件"能承受多强的光而不坏"的核心参数。本文从损伤机理、ISO 21254标准测试方法和工程选型三个维度,系统介绍LIDT测试的技术体系。
2026-07-07
-

DUV vs EUV光刻物镜装调:两种技术路线的精度博弈
DUV 和 EUV,两代光刻技术的核心光学系统,分别在 193nm 和 13.5nm 波长下工作。它们的装调精度要求相差的不是百分比,而是数量级。更关键的是,它们的装调方法论本身就是两套完全不同的逻辑。
2026-07-07
-
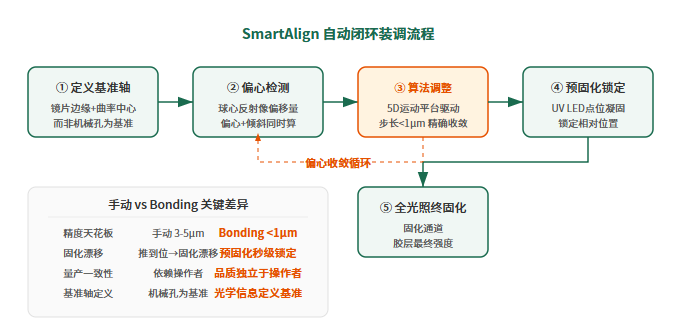
OptiCentric® Bonding 胶合装调系统,从"手感对准"到"算法锁定"
手动胶合时代,师傅的手感是精度上限——推到位靠经验,固化漂移靠运气,量产一致性靠祈祷。Bonding系统把这三件事交给算法:SmartAlign定义正确的轴、算法驱动精确的调整、梯度固化锁住精确的结果。
2026-07-07
-

精密光学检测实验室建设指南:从环境控制到设备布局的工程实践
一台精度λ/50的干涉仪放在一间没有温控的普通房间里,实测精度可能退化到λ/10以下。精密光学检测设备不是"买来就能用"的——它们的精度发挥严重依赖环境条件。本文从温度、湿度、振动、洁净度和设备布局五个维度,系统梳理精密光学检测实验室的建设要求和工程实践,为光学制造企业在规划检测实验室时提供可参考的技术框架。
2026-07-06
-

红外热像仪镜头选型指南:短焦、中焦与长焦的参数原理及场景适配
在红外热像仪的选型过程中,用户通常优先关注探测器分辨率参数,如384×288、640×512、1280×1024等指标。但在实际应用场景中,镜头焦距的适配性往往直接决定最终观测效果:同一台640×512分辨率的热像仪,搭配短焦镜头可实现大范围场景覆盖,但远距离小目标仅能占据少量像素;搭配长焦镜头可放大远处目标细节,但视场范围大幅收窄,搜索效率下降;中焦镜头虽兼顾二者特性,却未必适配所有特定场景。
2026-07-06







