
光学精密检测设备选型指南:从技术指标到产线应用的选择逻辑
导读:在精密光学制造中,检测设备的选择直接决定了制造良率和成本的基准线。面对干涉仪、MTF测量仪、中心偏差测量仪、测厚仪等多种设备类型,如何根据产品需求和产线条件做出最优选择?本文从光学元件和系统的检测需求出发,构建一套实用的选型逻辑框架。

一、先回答三个问题
在考察具体设备指标之前,先明确三个决定性的前提:
问题一:你在测什么? - 单透镜(元件级)→ 需要面形、中心厚度、偏心等参数 - 组装镜头(组件级)→ 需要MTF、后焦距、全场偏心等参数 - 光学系统(系统级)→ 需要波前误差、杂散光、偏振性能等
不同级别的检测需求对应完全不同的设备类型。
问题二:是研发验证还是量产检测? - 研发验证:精度优先,测量速度次要 - 量产检测:速度和一致性优先,需在线全检能力
问题三:产品的工作波段是什么? - 可见光(400-700nm)→ 标准设备即可覆盖 - 红外(3-5μm或8-12μm)→ 需要红外专用检测方案 - 紫外(<400nm)→ 需要紫外光学元件和探测器
二、按检测需求匹配设备类型
元件级检测
|
需要测的参数 |
推荐设备类型 |
典型品牌/型号 |
关键精度指标 |
|---|---|---|---|
|
面形精度(PV/RMS) |
干涉仪 |
µPhase系列 |
λ/20~λ/50 RMS |
|
中心偏差 |
定心仪 |
OptiCentric系列 |
±0.2μm或±2" |
|
中心厚度 |
测厚仪 |
OptiSurf系列 |
±0.5μm |
|
焦距 |
焦距测量仪 |
OptiSpheric系列 |
±0.05% |
|
棱镜角度 |
测角仪 |
PrismMaster系列 |
±0.5角秒 |
|
折射率 |
折射率测量仪 |
SpectroMaster系列 |
±3×10⁻⁶ |
|
表面粗糙度 |
轮廓仪 |
白光干涉轮廓仪 |
0.1nm垂直分辨力 |
系统级检测
|
需要测的参数 |
推荐设备类型 |
典型品牌/型号 |
关键精度指标 |
|---|---|---|---|
|
成像质量(MTF) |
MTF测量仪 |
ImageMaster系列 |
轴上0.8% MTF精度 |
|
波前误差 |
干涉仪 |
µPhase系列 |
λ/50 RMS |
|
杂散光/鬼像 |
杂散光测试 |
ImageMaster Lab VR |
HDR模式定量分析 |
|
AR波导成像 |
AR检测系统 |
ImageMaster Lab AR |
角度域MTF扫描 |
三、产线选型的核心考量
3.1 测量速度 vs 精度
产线选型面临的核心权衡是速度与精度:
-
高速场景(消费电子镜头,>2000件/小时):ImageMaster PRO 10(1.3秒/件,2700 UPH)提供最高的产线吞吐量
-
精度优先场景(光刻物镜、天文光学):µPhase干涉仪(λ/50 RMS)提供极限精度,但测量周期为分钟级
-
兼顾方案:OptiCentric系列提供0.2μm精度+数秒级测量周期,是精度和速度的最优平衡
3.2 自动化程度
-
全自动:ImageMaster PRO系列、OptiCentric系列(自动装夹+自动测量+自动判级+MES数据上传)
-
半自动:PrismMaster测角仪(自动旋转+自动采集,样品需手动装夹)
-
手动:µPhase干涉仪(需手动装夹和参数设定,适合研发场景)
3.3 环境鲁棒性
-
在线产线(振动、温度波动):ImageMaster PRO、OptiCentric PRO系列采用气浮隔振+主动温控,适应非洁净室环境
-
测量室(恒温、隔振):µPhase干涉仪、PrismMaster测角仪在优良环境下发挥极限精度
-
装调工位(有操作者、有机加工振动):UP/ACD系列定心仪专为工位环境设计
四、按产品类型推荐配置
消费电子镜头(手机/平板/运动相机)
必检项:MTF、EFL、场曲、中心厚度 推荐配置:ImageMaster PRO 10(MTF) + OptiSurf(测厚) 选检项:OptiCentric(偏心抽检)
车载镜头(ADAS/环视/DMS)
必检项:MTF(全温)、中心偏差、后焦距 推荐配置:ImageMaster Universal(研发全参数MTF) + OptiCentric 3D(偏心+间隔) 关键要求:-40°C~+85°C全温范围内MTF稳定性验证
红外镜头(热成像/红外导引)
必检项:中心偏差(红外波段)、MTF(红外波段) 推荐配置:OptiCentric IR(红外偏心) + ImageMaster Universal(红外MTF) 关键要求:必须在"使用波长"下测量,不能用可见光推算
AR/VR光学模组
必检项:角度域MTF、偏振串扰、杂散光/鬼像 推荐配置:ImageMaster Lab AR(AR光波导) + ImageMaster Lab VR(VR Pancake) 关键要求:角度分辨测量能力(传统MTF测量不适用)
五、成本效益的工程视角
选型不是"买最贵的",而是"买最对的"。一个有效的评估思路:
第一步:列出产品公差中"最紧的三项指标" 第二步:找到能同时测量这三项参数、精度高于公差一个量级的设备(如果不存在,找出最接近的组合) 第三步:评估该设备是否满足产线节拍——如果不能,是否需要多台并行? 第四步:评估后期升级扩展空间——当前产品可能只需可见光检测,但下一代产品是否需要红外?
典型的"一次到位"策略:购买OptiCentric 3D(中心偏差+镜面间隔二合一),避免后续再购独立的镜面定位仪。
六、常见误区
误区一:"干涉仪精度最高,用它测所有面形就够了。" → 干涉仪无法测量中心偏差、MTF和镜片间隔。不同参数需要不同设备。
误区二:"研发阶段的检测设备可以先凑合,等量产了再买好的。" → 研发阶段的检测精度决定了设计迭代的方向。如果一开始的测量数据就有系统偏差,所有的设计优化都建立在不可靠的基础上。
误区三:"进口设备太贵,国产替代也行。" → 选设备的关键不是产地,而是精度可溯源性(能否溯源到PTB/NIST等国际标准)和长期稳定性。选择已建立行业口碑的成熟品牌和设备是降低长期风险的最佳路径。
-

光学精密检测设备选型指南:从技术指标到产线应用的选择逻辑
在精密光学制造中,检测设备的选择直接决定了制造良率和成本的基准线。面对干涉仪、MTF测量仪、中心偏差测量仪、测厚仪等多种设备类型,如何根据产品需求和产线条件做出最优选择?本文从光学元件和系统的检测需求出发,构建一套实用的选型逻辑框架。
2026-06-26
-
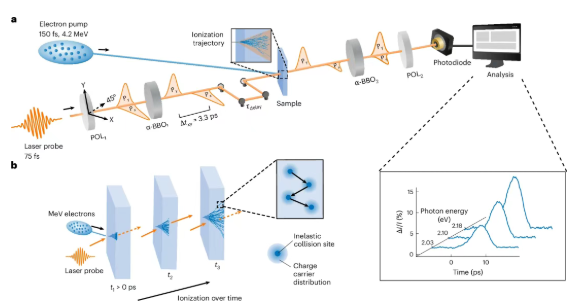
高能电子撞上半导体:解锁超快辐射检测新方法
最近斯坦福大学的研究团队有了一项重要突破:用兆电子伏(MeV)级的高能电子照射普通半导体,能在不到10皮秒(1皮秒=万亿分之一秒)的时间里产生极强的光学变化。这个发现有望把辐射检测的时间精度从纳秒级直接提升到皮秒级,给医学成像、辐射监测等领域带来质的飞跃。
2026-06-26
-

晶圆级光学元件检测:当光学测量遇上半导体工艺
在传统光学车间待久了,你对检测的认知大概是这样的:一枚镜片放在定心仪上,调好、读数、下一个。但如果把这枚镜片缩小到头发丝直径的十分之一,在8英寸晶圆上同时做5000个——检测就完全变了味。晶圆级光学元件(Wafer-Level Optics, WLO)已经在智能手机、3D传感、车载摄像和AR/VR里大规模商用。这篇从检测工程师的视角,拆解WLO的三大核心挑战和五条技术路线。
2026-06-26
-

光学薄膜检测:高反射率测量与弱吸收测试技术解析
光学薄膜的性能直接决定了系统级光学效率——激光陀螺需要反射率>99.99%的超高反射镜,激光加工系统需要吸收率<10 ppm的低损耗窗口。这两种极端需求的检测方法代表了光学薄膜计量学的精度前沿。本文系统阐述高反射率测量(腔衰荡法、谐振腔法)和弱吸收测试(光热偏转法、激光量热法)的技术原理、精度边界和应用场景,并探讨在精密光学制造中建立膜层性能全参数评价体系的工程意义。
2026-06-25
-

光学轮廓仪技术:从接触式探针到白光干涉的三维面形检测
光学轮廓仪(Profilometer)是精密表面微观形貌和宏观面形的核心检测工具,广泛应用于光学元件加工后的表面粗糙度评价、非球面面形的二维和三维表征、以及微纳结构(光栅、微透镜阵列)的几何参数测量。本文系统梳理接触式探针轮廓仪、共焦轮廓仪和白光干涉轮廓仪三种主流技术路线的物理原理、精度边界与适用场景,分析各类技术在光学制造不同环节中的差异化定位,并探讨轮廓测量在现代光学制造闭环中的工程价值。
2026-06-25






