
动态干涉仪:将干涉条纹调至最少的物理原理与工程逻辑
摘要:在菲索(Fizeau)或泰曼-格林(Twyman-Green)干涉仪的日常测量操作中,将干涉条纹调整至趋于零条纹或单条宽条纹,是决定测量精度与数据可靠性的关键步骤。本文从干涉强度分布的数学表达式出发,系统阐述"调至少条纹"行为的深层物理本质——即通过机械调整消除倾斜与离焦引入的附加相位,回归零位测量状态;进而分析各系统模块(光源、调整架、探测、相位解算)在少条纹条件下的工作原理,并给出关键难点的工程解决方案。

一、干涉条纹的物理本质:从强度公式到"三条纹"的来源
在两束光干涉的基本框架下,探测器平面上的干涉强度分布为:
I(x,y) = Ir + It + 2√(IrIt) · cos[Φ(x,y)]
其中 Ir、It 分别为参考光与测试光强度,Φ(x,y) 为总相位差
总相位差 Φ 可分解为三个独立分量:
Φ(x,y) = Φsurface(x,y) + Φtilt(x,y) + Φdefocus(x,y)
Φsurface 为面形误差引入的真实相位(待测信号);Φtilt 和 Φdefocus 分别为倾斜与离焦引入的附加相位(噪声)
其中倾斜项 Φtilt(x,y) = k(ax + by),离焦项 Φdefocus(x,y) = kc(x² + y²)/R²,k = 2π/λ 为波数,R 为通光半径。显然,Φtilt 在空间上呈线性分布,Φdefocus 呈二次分布,两者均会使 cos[Φ(x,y)] 的振荡频率急剧增大——即条纹变密。当条纹密度超过探测器的奈奎斯特频率(2像素/周期)时,空间采样发生混叠,相位解算失效。将条纹调至最少,本质上是通过机械调整消除 Φtilt 和 Φdefocus,使 Φ(x,y) ≈ Φsurface(x,y),实现零位(null test)或准零位测量。
二、分系统在少条纹条件下的工作机理
(一)光源模块
干涉仪通常采用稳频 He-Ne 激光器(λ = 632.8 nm)或可调谐半导体激光器。在少条纹状态下,光源工作于单一波长,后续相位解算可借助波长调谐实现移相。少条纹对光源的核心意义在于:波长调谐产生的相位变化在空间上均匀(ΔΦ ∝ Δλ),密集条纹区域不会出现因局部相位梯度不同步而导致的相位跳跃。
(二)参考镜与被测件调整模块
参考镜安装于干涉仪内部,面形精度通常为 λ/20 或更高。被测件置于五维或六维调整架上,可独立控制倾斜(tip/tilt)、离焦(defocus)及横向平移。倾斜角 α 与条纹宽度的关系为:相邻条纹间距 s = λ/(2α),当 α → 0 时 s → ∞——即全视场进入同相位状态(零条纹)。对于球面测量,还需通过猫眼(cat's eye)位置实现光轴对准,保证反射光原路返回。
(三)成像与探测模块
相机(CCD/CMOS)分辨率通常 ≥ 1k×1k。少条纹的直接工程收益体现在两方面:其一,稀疏条纹下每个干涉条纹周期覆盖更多像素,空间采样率提升,欠采样混叠风险降低;其二,对于空间载频法(傅里叶变换法),条纹越少意味着载频越低,背景频谱(光源不均匀性)与信号频谱(面形信息)的分离度更高,有效避免频谱混叠。
(四)相位解算模块
常用的相位提取方法为移相干涉术(Phase-Shifting Interferometry, PSI)和傅里叶变换法(FFT Method)。少条纹对两类方法的必要性不同:
|
方法 |
少条纹的必要性 |
密集条纹的风险 |
|---|---|---|
|
移相法(PSI) |
移相时条纹需稳定且无跳变;少条纹可保证各像素点相位变化均匀同步 |
密集条纹在环境振动或移相器非线性下易产生局部相位跳变,导致解算错误 |
|
傅里叶变换法(FFT) |
载频越低,面形频谱与背景频谱分离越充分;条纹周期 ≥ 10 像素可确保分离度 ≥ 5 倍半高宽 |
条纹过密时载频与背景分量交叠,产生频谱混叠,无法正确提取面形 |
三、四大关键技术难点
(一)倾斜与离焦的残余误差
将条纹调到视觉上的"最少"并不等同于完全消除 Φtilt 和 Φdefocus。微小的剩余倾斜和离焦会被错误地计入面形像差(如像散、球差)。以 1 弧秒剩余倾斜为例,在 φ100 mm 口径上可产生约 0.48 μm 的附加光程差,远超 λ/10(约 63 nm),构成面形测量的系统性误差。
(二)球面测量中的光轴对准(猫眼位置)
测量球面时需将标准球面镜头的焦点与被测球面的曲率中心或顶点重合(猫眼位置)。若光轴未对准,反射光无法原路返回,干涉图呈现非对称弯曲或楔形条纹,此时即便调整倾斜也无法达到零条纹状态。猫眼位置判断的核心判据是干涉图呈现同心圆环且数量为最少(仅一个中心亮斑或暗斑)。
(三)环境扰动对少条纹状态的破坏
条纹越宽,对相位变化越敏感——一次微小的环境振动即可导致整周期条纹移动,引发相位解包裹错误。空气扰动通过局部折射率变化(与温度梯度 ∇T 和气流速度 v 相关)改变光程差,机械振动则通过被测件与参考镜之间的相对位移直接引入 Φtilt 变化。少条纹状态下,这些时变误差的影响更为显著。
(四)大数值孔径球面与非球面的零位限制
对于深球面或非球面元件,仅靠调整倾斜和离焦无法达到零条纹状态,必须引入补偿器(如计算全息图 CGH 或零位透镜)。此时"调至最少条纹"指的是补偿后的残余条纹。可编程空间光调制器(SLM)为自适应零位补偿提供了新的技术方向,可避免频繁更换物理补偿器。
四、工程解决方案
(一)倾斜与离焦的精密调整与软件扣除
硬件层面,采用压电陶瓷(PZT)驱动调整架配合闭环反馈,将倾斜残差控制在 0.1 弧秒以内。软件层面,测量后通过 Zernike 多项式拟合主动扣除前三项(平移、X 倾斜、Y 倾斜)和第四项(离焦),仅保留高阶面形误差。需特别注意的是:若原始条纹密度已超过探测器奈奎斯特频率,Zernike 拟合亦无法准确提取——前置机械调整不可省略。
(二)球面测量的标准化猫眼对准流程
步骤一:将被测球面移至距标准镜头焦点约等于曲率半径处;步骤二:调整横向位移和俯仰/偏摆,使反射光斑落入相机中心且干涉图呈同心圆环;步骤三:微调轴向位置,使同心圆环数量减至最少(仅一个亮斑或暗斑),确认光轴对准;步骤四:退回零位(被测球面与标准镜头共心),再次调整倾斜使条纹最少。辅以图像处理算法实时计算条纹密度和对称性,自动给出调整指引,是提升操作一致性的有效手段。
(三)环境隔离与动态干涉测量
被动方案:干涉仪置于气浮光学平台并加装隔振罩,空调出风口远离光路,测量期间限制人员走动。主动方案:采用动态干涉仪,单次曝光采集多幅移相干涉图,可在强振动环境下维持有效测量;同时利用波长调频与同步探测技术实时补偿环境相位漂移。
(四)非球面及大数值孔径球面的补偿策略
对于无法直接达到零条纹的表面,需设计定制 CGH 或零位透镜,将参考波前转换为与被测面理论面形共轭的波前。此时的目标是在补偿后的残余条纹中使条纹数量最少。SLM 自适应零位补偿技术有望取代固定式物理补偿器,提升检测的灵活性和经济性。
(五)少条纹状态下的相位解算优化
当全视场相位差 < 2π(即 ≤ 1 条条纹)时,直接采用移相法解算,无需相位解包裹步骤。对于无法完全消除倾斜的场合(如大口径平面拼接测量),保持条纹周期 ≥ 10 像素以确保 FFT 法频谱分离度 ≥ 5 倍半高宽。同时采用基于最小二乘或路径跟随法的抗噪解包裹算法,增强对稀疏条纹中局部相位跃变的鲁棒性。
五、高精度干涉仪在工程实践中的适配
上述技术逻辑对干涉仪硬件提出了综合性能要求:光源的稳定性(频率漂移 < 10 MHz/h)、参考镜的面形精度(λ/20 PV 或更高)、调整架的分辨率和闭环控制能力(< 0.1 弧秒)、以及环境隔离与动态补偿系统的有效性。以 TRIOPTICS 公司的 μPhase 系列干涉仪为代表的高端商用设备,将上述技术要素集成于统一的工程平台——其稳频光源方案、高精度标准镜头系列(包括球面标准镜头和大口径平面参考镜)、以及配套的五维/六维精密调整架,共同保障了从"条纹调至最少"到"高可信度面形数据输出"的完整技术链路。在需要 CGH 补偿的非球面检测场景中,μPhase 与定制 CGH 的组合可进一步将检测范围从球面/平面扩展至自由曲面,精度维持在 λ/50 RMS 量级。
六、结语
将干涉条纹调至最少,表面看是一项基础操作技能,实则是干涉测量的核心物理逻辑——通过机械方式主动消除倾斜与离焦的附加相位,使系统回归零位或近零位测量状态,从而在根源上保障数据质量。认知这一本质逻辑的工程价值在于:操作者不再将该步骤视为经验性的"手感"操作,而是以定量的相位控制思维执行"粗调 → 细调 → 确认条纹最少 → 环境稳定 → 测量"的标准流程,并主动利用软件工具扣除剩余低阶像差,最终获得可复现、可溯源的精确面形数据。
原载「光学装调及检测」公众号
参考文献
[1] Malacara D. Optical Shop Testing (3rd ed.). Wiley, 2007.
[2] Greivenkamp J E, Bruning J H. Phase shifting interferometry. In: Optical Shop Testing, Wiley, 1992: 501–598.
[3] 国家标准 GB/T 4315.1–2009 光学传递函数 第1部分:术语、符号.
-

VR/AR光学检测全景指南:从光波导到整机成像质量的技术解析与设备方案
随着Apple Vision Pro、Meta Quest系列等产品的持续迭代,VR(虚拟现实)和AR(增强现实)已从概念验证阶段迈入规模化量产。然而,VR/AR光学系统的复杂性远超传统成像镜头——菲涅尔透镜的杂散光控制、光波导的衍射效率均匀性、Pancake方案的偏振性能,每一项都对光学检测提出了全新的技术挑战。本文系统梳理VR/AR光学检测的核心技术难点、检测参数体系以及适配不同产品形态的设备方案,为VR/AR光学制造商和研发机构提供实用的参考指南。
2026-07-24
-

手机镜头与车载摄像头MTF检测:从研发到量产的光学质量保障方案
在智能手机多摄化、车载摄像头智能化的行业趋势下,光学镜头的成像质量直接决定了终端产品的用户体验。MTF(调制传递函数)作为衡量光学系统成像性能的核心指标,已成为从镜头设计到量产交付全流程中不可或缺的检测环节。本文将围绕手机镜头和车载摄像头两大应用场景,系统介绍MTF检测的技术原理、关键挑战以及适配不同生产阶段的设备方案。
2026-07-24
-

万亿美元前夜:SEMICON China 2026给光学检测的5个信号
3 月底的 SEMICON China 2026 把"AI 算力"推到了 C 位。SEMI 中国总裁冯莉在开幕主题演讲里抛了一组数:2025 年全球半导体销售 7917 亿美元,2026 年预计 9750 亿,原定 2030 年才到的万亿美元节点,大概率要提前四年撞线。
2026-07-24
-
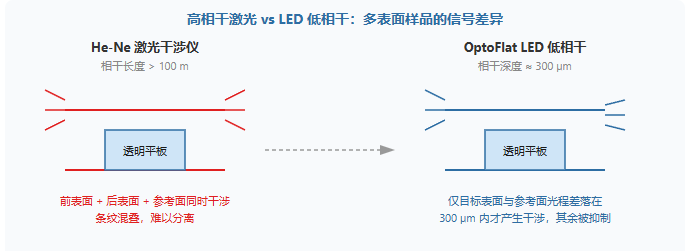
OptoFlat® 低相干干涉仪:平面光学件的“透明陷阱”怎么破
测一块双面抛光的晶圆或光学窗口,激光干涉仪的屏幕上经常飘出一团“鬼影”——前后表面同时出条纹,参考面和被测面互相抢戏,最后连 PV 值该信哪一面都说不清。OptoFlat 要做的,就是把这个“透明陷阱”关掉。
2026-07-23
-
光学窗口与平板件的平行度与透射波前检测
在激光防护窗口、红外热像仪保护窗和干涉仪分光镜中,一块看似"平整"的光学平板承载着不亚于透镜的精度要求——平行度3角秒、透射波前λ/10。平板光学件的检测与透镜检测有本质区别:没有光焦度意味着传统的焦距法和自准直法不再适用,而"平行度"和"透射波前"这两个参数也不像面形PV那样直观易懂。本文从平行度和透射波前两个核心指标出发,系统介绍平板光学件的精密检测方法。
2026-07-22







