
激光雷达核心架构解析:六大系统支撑空间感知技术革新
随着自动驾驶、智能机器人、三维测绘等新兴领域的快速崛起,激光雷达作为“空间感知核心”,凭借其精准捕捉三维环境信息的核心能力,已成为推动相关产业升级的关键技术装备。这一高性能装备的稳定运行,依赖于一套复杂且精密的系统架构,其核心工作逻辑可简化为“发射激光→扫描环境→接收回波→处理信号→输出数据”,由六大核心系统协同运作,并辅以支撑系统保障长期稳定,各环节环环相扣、缺一不可。本文将深入解析激光雷达的核心架构,明晰各系统的功能定位与关键作用。
一、激光发射系统:探测起点的性能基石
激光发射系统是激光雷达的“核心动力源”,其核心任务是生成强度高、单色性好、稳定性强的高质量激光脉冲,直接决定了雷达的探测距离与测量精度,为整个感知流程奠定基础。
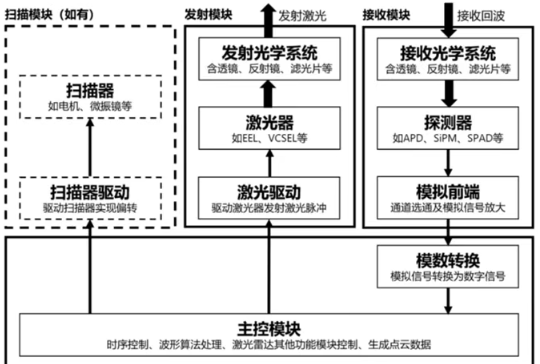
该系统的核心组件包括三类关键设备:一是激光器,作为激光脉冲的“发源地”,分为固态激光器(如EEL边发射激光器,适配长距离探测场景)和半导体激光器(如VCSEL垂直腔面发射激光器,适用于短距离、高集成度应用场景);二是光束扩展器,通过扩大激光束直径,在提升探测覆盖范围的同时,有效减少能量损耗;三是光束整形器,将激光束校准为圆形、矩形等理想光斑形状,确保探测点的均匀性,保障探测数据的一致性。在实际应用中,自动驾驶领域常用的长距激光雷达多采用EEL激光器,搭配光束扩展器后探测距离可轻松突破200米;而消费级机器人则更倾向于选用体积小、功耗低的VCSEL激光器,以适配近距离环境感知需求。
二、扫描系统:全域覆盖的激光导航中枢
激光束无法自然实现全景覆盖,扫描系统作为“激光导航员”,其核心作用是操控激光束按预设路径扫描,确保完整覆盖目标探测区域,是激光雷达实现全域感知的关键环节。
目前主流的扫描方式主要分为三类:机械旋转扫描,通过旋转反射镜实现360°全景扫描,能提供全方位环境感知;MEMS微镜扫描,利用微电子机械系统技术实现快速电子扫描,兼顾扫描速度与灵活性;固态扫描(如FlashLiDAR),无需机械转动结构,具备体积小、可靠性高的优势。扫描方案的选择是激光雷达设计的“首要决策”,直接决定了产品的体积、功耗参数,进而影响其应用场景适配性,也是区分不同类型激光雷达产品的核心标志之一。
三、光学系统:信号传输的纯净通道保障
光学系统作为激光传输与回波接收的“专属通道”,同时承担“滤镜”功能,既要保障激光信号的顺畅传输,又要有效过滤环境干扰,为后续信号处理提供纯净的输入基础。
该系统分为发射端和接收端两大模块:发射端光学组件以透镜、反射镜为核心,主要负责聚焦激光脉冲,使能量集中指向目标探测区域,提升激光利用效率;接收端光学组件则包括接收透镜、光学滤波器和光电探测器,其中光学滤波器是核心关键部件,能够精准过滤阳光、环境灯光等杂散光,仅允许激光回波信号通过,避免杂散光对信号检测造成干扰;接收透镜则将回波信号汇聚到光电探测器上,确保信号的有效捕捉。简言之,光学系统通过“筛选有用信号、屏蔽干扰杂光”的核心作用,保障了接收信号的纯净度,为后续高精度测量提供支撑。
四、接收与信号处理系统:距离计算的核心大脑
如果说激光发射系统是激光雷达的“信号输出端”,那么接收与信号处理系统就是兼具“信号捕捉”与“数据计算”功能的“大脑中枢”,不仅负责捕捉激光回波信号,更通过精准计算得出目标物体的距离信息。
该系统的核心工作流程由四大组件协同完成:首先是光电探测器,将捕捉到的光信号转换为电信号,常见类型包括APD(雪崩光电二极管,适配中长距离探测)、SiPM(硅光电倍增管,具备宽动态范围优势)、SPAD(单光子雪崩二极管,拥有单光子级灵敏度,可捕捉极微弱回波信号);其次是前置放大器,对转换后的微弱电信号进行放大,为后续处理提供清晰信号源;再者是时间数字转换器(TDC),以皮秒级精度测量激光脉冲“发射→回波”的飞行时间(ToF),其精度直接决定测距准确性——1皮秒的时间误差对应仅0.15毫米的距离误差,是实现高精度测距的核心保障;最后是数字信号处理器(DSP),根据“距离=光速×飞行时间/2”的核心公式计算目标距离,并初步处理信号噪声,为后续点云生成奠定基础。该系统的性能直接决定了激光雷达的测距精度和抗干扰能力,例如SPAD探测器的单光子灵敏度,可确保激光雷达在夜间、雨雾等低光照复杂环境下依然稳定工作。
五、数据处理系统:环境信息的价值转化中枢
接收与信号处理系统生成的原始数据为“杂乱的点云”(即海量三维坐标点),无法直接为终端设备提供决策支持,数据处理系统作为“原始点云的精细化处理中枢”,通过一系列加工处理,将原始数据转化为机器可识别的环境信息,实现数据价值的有效释放。
其核心功能包括四大环节:一是数据去噪/滤波,剔除雨滴、灰尘等干扰因素产生的无效点云数据,保障数据质量;二是三维建模,将经过筛选的有效点云拼接成完整的三维环境模型,还原真实场景;三是目标分类与跟踪,精准识别车辆、行人、障碍物等目标物体,并实时跟踪其运动轨迹;四是数据传输,通过以太网、CAN总线等标准化接口,将处理后的有效环境信息传输给主机(如自动驾驶汽车的域控制器)。数据处理系统的核心价值在于“从海量点云中提炼有效信息”,让激光雷达的感知结果直接服务于终端设备的决策环节,是连接感知与决策的关键桥梁。
六、其他支撑系统:稳定运行的基础保障
除上述五大核心功能系统外,激光雷达还需三类支撑系统,作为保障设备长期稳定运行的“基石”,确保各核心系统协同高效工作。
一是控制系统,相当于整个设备的“总调度中心”,负责协调各系统的时序同步(如激光发射与扫描的节奏匹配),同时实时监控各组件的工作状态,及时响应异常情况;二是电源系统,为各组件提供稳定的电压和电流,避免电压波动对激光器、探测器等核心部件的性能造成影响;三是外壳散热系统,激光器、处理器等组件在工作过程中会产生大量热量,散热系统通过散热片、风扇或被动散热设计,有效控制设备温度,防止高温导致性能衰减或设备故障,保障激光雷达在复杂工况下的持续稳定运行。
激光雷达的核心架构体现了精密工程与先进技术的深度融合,六大核心系统各司其职、协同联动,辅以支撑系统的稳定保障,共同实现了高精度、高可靠性的空间感知能力。随着相关技术的持续迭代,激光雷达的体积将进一步小型化、功耗持续降低、性能不断提升,其应用场景也将不断拓展,为自动驾驶、智能机器人等领域的技术革新提供更加强劲的支撑,推动人类社会向智能化、自动化方向持续迈进。
-

VR/AR光学检测全景指南:从光波导到整机成像质量的技术解析与设备方案
随着Apple Vision Pro、Meta Quest系列等产品的持续迭代,VR(虚拟现实)和AR(增强现实)已从概念验证阶段迈入规模化量产。然而,VR/AR光学系统的复杂性远超传统成像镜头——菲涅尔透镜的杂散光控制、光波导的衍射效率均匀性、Pancake方案的偏振性能,每一项都对光学检测提出了全新的技术挑战。本文系统梳理VR/AR光学检测的核心技术难点、检测参数体系以及适配不同产品形态的设备方案,为VR/AR光学制造商和研发机构提供实用的参考指南。
2026-07-24
-

手机镜头与车载摄像头MTF检测:从研发到量产的光学质量保障方案
在智能手机多摄化、车载摄像头智能化的行业趋势下,光学镜头的成像质量直接决定了终端产品的用户体验。MTF(调制传递函数)作为衡量光学系统成像性能的核心指标,已成为从镜头设计到量产交付全流程中不可或缺的检测环节。本文将围绕手机镜头和车载摄像头两大应用场景,系统介绍MTF检测的技术原理、关键挑战以及适配不同生产阶段的设备方案。
2026-07-24
-

万亿美元前夜:SEMICON China 2026给光学检测的5个信号
3 月底的 SEMICON China 2026 把"AI 算力"推到了 C 位。SEMI 中国总裁冯莉在开幕主题演讲里抛了一组数:2025 年全球半导体销售 7917 亿美元,2026 年预计 9750 亿,原定 2030 年才到的万亿美元节点,大概率要提前四年撞线。
2026-07-24
-
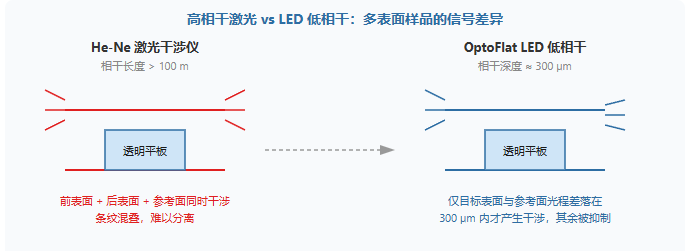
OptoFlat® 低相干干涉仪:平面光学件的“透明陷阱”怎么破
测一块双面抛光的晶圆或光学窗口,激光干涉仪的屏幕上经常飘出一团“鬼影”——前后表面同时出条纹,参考面和被测面互相抢戏,最后连 PV 值该信哪一面都说不清。OptoFlat 要做的,就是把这个“透明陷阱”关掉。
2026-07-23
-
光学窗口与平板件的平行度与透射波前检测
在激光防护窗口、红外热像仪保护窗和干涉仪分光镜中,一块看似"平整"的光学平板承载着不亚于透镜的精度要求——平行度3角秒、透射波前λ/10。平板光学件的检测与透镜检测有本质区别:没有光焦度意味着传统的焦距法和自准直法不再适用,而"平行度"和"透射波前"这两个参数也不像面形PV那样直观易懂。本文从平行度和透射波前两个核心指标出发,系统介绍平板光学件的精密检测方法。
2026-07-22







