
激光雷达核心组成与模块功能解析
激光雷达作为高精度感知领域的关键技术装备,广泛应用于自动驾驶环境感知、无人机地形测绘、工业三维建模等场景。其实现精准空间探测的核心,在于内部各模块的协同工作。结合专业技术资料,激光雷达系统的核心组成可划分为发射模块、接收模块及数据处理模块三大单元,三者通过功能联动,完成从激光发射、信号接收至数据解析的全流程。

一、发射模块:激光信号的生成与定向发射
发射模块是激光雷达的激光源输出单元,主要功能为生成符合探测需求的激光信号,并通过光学调控实现定向覆盖,其构成部件根据系统设计需求存在差异,并非所有设备均需完整配置。
1.脉冲激光器:核心光源组件
作为发射模块的核心部件,脉冲激光器承担激光信号生成任务,其性能参数直接决定激光雷达的探测能力。关键技术指标包括:重复频率(即相邻两个激光脉冲时间间隔的倒数,影响探测效率)、脉冲宽度(对探测精度具有显著影响)、平均功率(与最大探测距离正相关)。此外,激光波长作为重要技术参数,需结合具体应用场景单独分析,此处暂不展开。
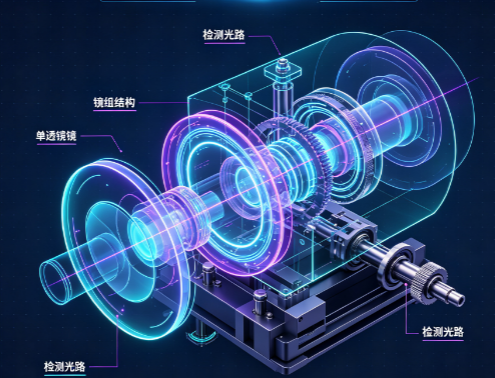
2.光学元件:激光束的整形与调控
光学元件以各类透镜为主,主要功能为对激光器输出的原始激光束进行整形与光路校准。根据激光雷达的工作模式,可将激光束调控为平行光(适用于远距离探测场景)、线列光(满足线性扫描需求)或面光(实现平面区域覆盖),确保激光信号按预设路径覆盖目标探测区域。
3.摆扫部件:激光探测范围的扩展机构
摆扫部件为可选配置,其部署与否取决于激光束的初始覆盖形态。若光学元件已将激光束整形为面光,可直接实现大范围覆盖,则无需额外配置摆扫部件;若为单点激光输出,需通过摆扫部件驱动激光束进行二维或三维扫描,以扩大探测范围。常见的摆扫部件包括转镜、机械摆镜等,其中MEMS微摆镜因体积小、扫描精度高、响应速度快等优势,成为当前小型化激光雷达的重点研究方向。
二、接收模块:反射信号的捕捉与信号转换
发射的激光信号接触目标物体后会产生反射,接收模块的核心功能为捕捉反射激光信号,并将其转换为可计算的电信号,同时完成时间测量与数据初步采集,其部件构成与发射模块存在功能呼应,但更侧重信号解析与处理。
1.探测器:反射光信号的接收核心
探测器作为光信号接收单元,其功能类似于信号捕捉传感器,负责接收目标物体反射的激光信号。衡量探测器性能的关键指标包括:探测灵敏度(决定对微弱反射信号的捕捉能力)、死区时间(两次有效探测的最小时间间隔)、后脉冲特性(影响信号抗干扰能力),上述参数直接关系激光雷达的探测准确性与稳定性。
2.计时电路:距离测量的关键单元
激光雷达基于“飞行时间法(ToF)”实现距离计算,计时电路承担时间测量任务,相当于系统的“时间计量基准”。其核心技术指标分为两类:一是最小计时精度,目前行业内最高水平可达到1ps及以下,精度越高则距离测量误差越小;二是计时长度,通常以“时间仓(bin)”为单位计量,例如某型号计时电路的最小精度为55ps,计时长度为1024个时间仓,即总计时范围为55ps×1024。需特别说明的是,计时电路的最小精度不等于激光雷达的时间分辨率,后者还受探测器响应速度、信号传输延迟等因素影响,因此更准确的表述应为“计时电路精度为激光雷达的时间采样率,实际时间分辨率低于该采样率”。
3.配套光学元件与摆扫部件
接收模块需配置与探测器适配的镜头等光学元件,主要关注参数包括视场范围(决定反射信号的接收覆盖角度)、镜头口径(影响光信号接收量)、数值孔径(关系光信号的汇聚效率)。摆扫部件的配置逻辑与发射模块一致,需根据探测器的像元数量与分布确定——单点探测器通常需搭配二维摆扫机构以实现区域覆盖,且部分摆扫部件可与发射模块共用,以简化系统结构、降低设备冗余。
三、数据处理模块:原始数据的解析与应用转化
发射模块与接收模块输出的信号为原始数据(如激光飞行时间、反射光强等),无法直接用于实际应用,数据处理模块承担原始数据的解析、处理与转化任务,是连接“信号”与“应用”的关键单元。
数据处理模块的硬件形态具有灵活性:部分激光雷达系统在出厂时已集成专用运算核心,可对原始数据进行预处理(如噪声过滤、数据格式转换),输出初步整理后的结构化数据;另一部分系统仅输出未处理的原始信号,需用户外接计算机、嵌入式处理设备等,通过专用算法完成后续处理(如点云生成、三维建模、目标识别)。从系统完整性角度,数据处理模块与发射模块、接收模块共同构成激光雷达的三大核心单元,三者协同工作方可实现完整的探测功能。
激光雷达系统的组成遵循“功能分区、协同联动”的技术逻辑,发射模块负责激光信号的生成与输出,接收模块完成反射信号的捕捉与时间测量,数据处理模块实现原始数据的应用转化。上述分析基于专业技术资料的核心框架,若存在技术细节疏漏,欢迎相关领域研究者指正补充。对激光雷达组成的深入理解,是掌握其工作原理、优化技术应用的重要基础。
-

光学冷加工全流程:从毛坯到精密镜片的制造工艺
一片直径50mm的精密球面透镜,从一块粗糙的玻璃毛坯到面形精度λ/10、表面粗糙度Ra<1nm的成品,需要经历十余道工序。每一道工序都有特定的设备、工艺参数和检测标准,任何环节的失控都会在最终元件上留下不可逆的缺陷。本文系统梳理光学冷加工从铣磨、精磨、抛光到定心磨边的完整工艺流程,为光学制造从业者提供⼀份全景式的工艺参考。
2026-07-09
-

OptiCentric® IR — 红外镜头定心装调:从 3.39μm 到 10.5μm,让红外光学"对得齐、装得稳"
红外镜头、夜视系统、热成像模组……这些设备里跑的,可能是 3μm、5μm,甚至 10μm 量级的光波。面对这种波段,常规可见光定心仪压根看不到信号——镜片要么把光吃掉了,要么把光反射走了,自准直仪的 CCD 上只剩一片漆黑。OptiCentric® IR 红外偏心仪就是为了解决"看不见"这个根本问题而生的。
2026-07-09
-
精密光学装配技术:从单透镜到系统的装调方法与精度控制
一片面形精度λ/20、偏心<0.2μm的完美透镜,装入镜筒后,如果装配误差为5μm——系统MTF劣化可能超过自身光学设计的允差。精密光学装配不是简单的"把镜片放进去拧紧",而是一项以微米为单位的系统工程。本文从装调基准选择、胶合/压装/螺纹装配三种方式、以及装调过程中的在线检测三个维度,系统介绍精密光学的装配技术。
2026-07-09
-
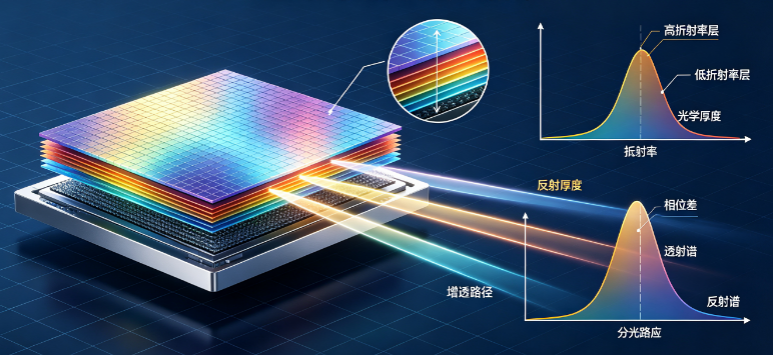
光学薄膜膜系设计基础:增透膜、反射膜与分光膜的原理与工程选择
一片未经镀膜的冕牌玻璃表面,仅因菲涅耳反射就会损失约4%的入射光。经过6~8片镜片的镜头,累积光损失可达25%~35%。光学薄膜的核心任务,就是通过精确控制纳米级厚度的介质膜层,将光的反射、透射和吸收特性调节到设计目标。本文从薄膜光学的基本原理出发,系统介绍增透膜、高反射膜和分光膜三类最常用膜系的设计思路和工程考量。
2026-07-08
-

光学元件精密清洁与维护:从实验室到产线的操作规范
一颗直径5μm的灰尘颗粒,落在干涉仪参考面上,产生的散射信号足以让λ/50的精度退化到λ/10。在精密光学领域,清洁不是"擦干净就行"的保洁工作——它是保护光学表面和测量精度的一道严谨工序。本文从污染物类型、清洁剂选择、操作手法和设备维护四个维度,系统梳理光学元件的精密清洁规范。
2026-07-08







