
超表面相机实现被动单次四维成像的技术突破与应用前景
传统成像系统在获取场景多维光场信息时面临显著技术瓶颈。近日,清华大学研究团队于《Nature Communications》发表的最新成果表明,基于单层超表面的单目成像系统可在环境光下单次曝光同步获取场景的二维全聚焦强度、深度及偏振信息,为多维成像领域提供了革命性解决方案。该技术突破了传统光学系统在体积、复杂度及能耗上的限制,在机器视觉、生物医学及遥感等领域展现出重要应用价值。
一、传统多维成像技术的局限性与研究背景
(一)多维光场信息获取的技术挑战
传统相机仅能记录二维强度图像,而三维深度与偏振信息的同步采集长期依赖复杂光学架构。例如,结构光三维成像需主动激光照明,双目视觉受基线长度限制深度分辨率,偏振成像则普遍采用振幅分割或时域复用方案,导致系统体积庞大且实时性不足。随着自动驾驶、智能感知等领域对场景全维度信息需求的提升,研发紧凑型、高集成度的多维成像系统成为学术界与工业界的重要目标。
(二)点扩散函数(PSF)的维度编码机制
成像系统的点扩散函数(PSF)对光场信息的编码能力是突破上述瓶颈的关键。理论上,若PSF对目标深度(z)与偏振态(p)具有强相关性,则可通过单次成像实现多维信息解耦。标准镜头的离焦PSF因自相似性导致深度估计精度有限,而双螺旋PSF等传统衍射元件虽优化了深度相关性,却面临计算复杂度高、需参考图像等问题,难以满足实时多维成像需求。
二、超表面相机的技术创新与系统架构
(一)偏振解耦的共轭单螺旋PSF设计
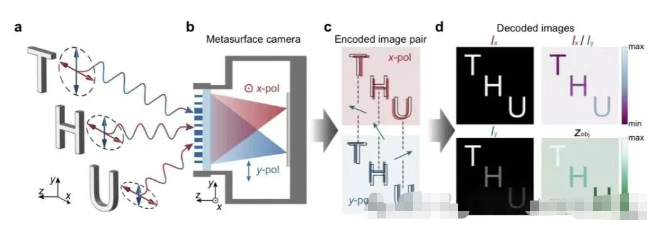
该系统的核心在于优化设计的单层超表面,其通过纳米结构调控光场矢量特性,生成一对空间分离、偏振正交的共轭单螺旋PSF。具体而言,超表面将x偏振与y偏振光分别聚焦于探测器平面的横向偏移位置,形成具有深度依赖特性的旋转矢量场。目标深度信息被编码于PSF平移矢量的局部方向,而偏振态则由正交偏振光的强度分布表征,实现了光场信息的物理维度解耦。
(二)超表面微纳结构与光学表征
超表面单元由蓝宝石衬底上的矩形硅纳米柱阵列构成,纳米柱高度600nm、周期330nm,通过调控宽度(100-250nm)与长度实现相位分布优化。实验表明,该结构在800nm近红外波段可生成理论设计的单螺旋PSF,其离轴角与目标深度呈线性关系,费舍尔信息较标准镜头提升两个数量级,为高精度参数估计奠定物理基础。
三、实验验证与性能分析
(一)静态场景多维成像能力
在室内实验中,系统对由纸张、铁和陶瓷组成的多深度场景进行单次拍摄,通过图像分割与模板匹配算法解码后,深度图归一化平均绝对误差(NMAE)仅0.37%,偏振对比度(Iₓ/Iᵧ)清晰区分金属与非金属材料特性。该结果验证了系统在静态环境下的多维信息同步采集能力。
(二)动态场景实时感知性能
室外动态实验中,系统对以-10cm/s速度移动的玩具汽车进行跟踪成像,静止目标与运动目标的深度估计NMAE分别为0.78%与1.26%,成功捕捉三维场景的时空演化关系。尽管室外场景因积分时间延长导致运动模糊,但其深度估计精度仍维持在工程应用可接受范围。
四、应用前景与技术拓展
(一)关键领域应用潜力
1.智能驾驶与机器人视觉:环境光下的实时四维成像可提升自动驾驶系统对复杂路况的三维感知精度,偏振信息有助于区分不同材质障碍物(如积水路面与干燥路面),增强恶劣天气下的环境鲁棒性。
2.生物医学显微成像:紧凑型系统可集成于内窥镜等设备,深度信息支持细胞三维重构,偏振分析适用于生物分子取向检测,为活细胞动态观测提供新工具。
3.遥感与增强现实:通过多光谱超表面拓展,可实现地物材质与深度的同步反演;在AR领域,单次成像获取的四维光场信息可显著提升虚实融合场景的真实感。
(二)未来技术发展方向
当前系统尚局限于窄光谱带宽,未来可通过以下路径优化:
-多光谱与全偏振拓展:利用超表面波长依赖特性设计多通道PSF,结合压缩感知算法实现全斯托克斯偏振成像与光谱分析;
-算法与硬件协同优化:引入深度学习提升复杂场景的逐像素多维解算效率,通过多层超表面堆叠扩大视场与离轴角度;
-工程化集成设计:优化纳米加工工艺降低成本,推动系统与CMOS探测器的单片集成,实现消费级设备应用。
清华大学团队提出的单目光学超表面相机,通过微纳光学结构与物理驱动算法的协同创新,突破了传统成像系统的维度限制,实现了被动单次四维成像。该技术不仅为光场信息获取提供了全新范式,更推动了成像系统向小型化、低功耗方向发展。随着技术迭代与应用拓展,超表面多维成像技术有望成为下一代智能感知系统的核心基础。
-

激光损伤阈值(LIDT)测试技术:ISO 21254标准解读与工程实践
高功率激光系统中的光学元件,承受着每平方厘米数焦耳至数千焦耳的能量密度。一片反射镜的膜层在若干次脉冲后出现针孔——系统功率被迫降级,甚至整机返修。激光诱导损伤阈值(LIDT)是决定光学元件"能承受多强的光而不坏"的核心参数。本文从损伤机理、ISO 21254标准测试方法和工程选型三个维度,系统介绍LIDT测试的技术体系。
2026-07-07
-

DUV vs EUV光刻物镜装调:两种技术路线的精度博弈
DUV 和 EUV,两代光刻技术的核心光学系统,分别在 193nm 和 13.5nm 波长下工作。它们的装调精度要求相差的不是百分比,而是数量级。更关键的是,它们的装调方法论本身就是两套完全不同的逻辑。
2026-07-07
-
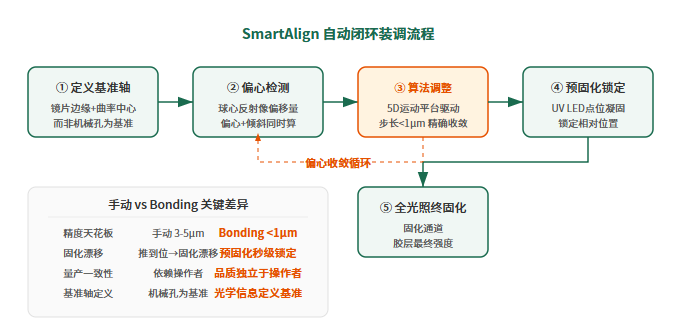
OptiCentric® Bonding 胶合装调系统,从"手感对准"到"算法锁定"
手动胶合时代,师傅的手感是精度上限——推到位靠经验,固化漂移靠运气,量产一致性靠祈祷。Bonding系统把这三件事交给算法:SmartAlign定义正确的轴、算法驱动精确的调整、梯度固化锁住精确的结果。
2026-07-07
-

精密光学检测实验室建设指南:从环境控制到设备布局的工程实践
一台精度λ/50的干涉仪放在一间没有温控的普通房间里,实测精度可能退化到λ/10以下。精密光学检测设备不是"买来就能用"的——它们的精度发挥严重依赖环境条件。本文从温度、湿度、振动、洁净度和设备布局五个维度,系统梳理精密光学检测实验室的建设要求和工程实践,为光学制造企业在规划检测实验室时提供可参考的技术框架。
2026-07-06
-

红外热像仪镜头选型指南:短焦、中焦与长焦的参数原理及场景适配
在红外热像仪的选型过程中,用户通常优先关注探测器分辨率参数,如384×288、640×512、1280×1024等指标。但在实际应用场景中,镜头焦距的适配性往往直接决定最终观测效果:同一台640×512分辨率的热像仪,搭配短焦镜头可实现大范围场景覆盖,但远距离小目标仅能占据少量像素;搭配长焦镜头可放大远处目标细节,但视场范围大幅收窄,搜索效率下降;中焦镜头虽兼顾二者特性,却未必适配所有特定场景。
2026-07-06







