
透镜中心偏差及其测量方法探讨
在现代光学领域,透镜作为关键的光学元件,其质量直接影响光学系统的成像效果与整体性能。透镜中心偏差作为一种重要的几何偏差,对光学系统的成像质量有着不可忽视的影响。本文将深入探讨透镜中心偏差测量的定义、相关术语以及常见的测量方法。

一、透镜中心偏差的定义
透镜中心偏差指的是光学系统中各透镜曲率中心相对于系统光轴的偏离。这种偏离主要表现为两种形式:倾斜和平移。当透镜存在中心偏差时,其装配后的共轴性遭到破坏,进而导致光学系统产生附加像差,如慧差和像散等。这些像差并非光学设计的固有残余像差,而是由制造工艺过程中的偏差所引起,对成像质量造成损害。
二、相关术语解释
1.透镜中心偏差:以光学表面定心顶点处的法线对基准轴的偏离量来衡量,该夹角被称为面倾角。
2.基准轴:用于标注、检验、校正中心偏差的轴,其确定需依据定位零件或组件光学表面的特性。
3.几何轴:透镜边缘面的旋转轴。
4.定心顶点:光学表面与基准轴的交点。
5.球心差:被检光学表面球心到基准轴的距离。
6.偏心差:被检光学零件或组件的几何轴在后节面上的交点与后节点的距离,数值上等同于透镜绕几何轴旋转时焦点像跳动圆半径。
三、中心偏差测量方法
目前,中心偏差的测量方法主要依据光源的相干性以及光线传播方式进行分类,形成了以下四种主要方法:
(一)反射式准直成像测量法
此方法基于自准直光路原理,将被测球面的中心偏差通过指标物的自准像偏移反映出来。通常借助放大光学系统对反射指标像进行细致观测。其优势在于结构简单,测量结果直观呈现,便于操作与快速评估。
(二)透射式准直成像测量法
该方法中,指标物体经光学系统形成平行光,再经被测透镜折射成像。若被测透镜存在中心偏差,则透射指标像会发生偏离。透射式测量的主要设备与反射式测量设备基本一致,仅需额外增加一个准直系统,以便实现平行光的产生与成像检测。
(三)反射式干涉测量法
利用被测镜片表面的反射光与参考光发生干涉,从干涉图样中提取中心偏差信息。具体又可分为中心干涉测量和边缘干涉测量两种方式。中心干涉测量通过分析镜片表面中心部分反射光与参考光的干涉条纹,确定被测镜片被测面球心位置;边缘干涉测量则借助透镜边缘光的干涉,通过对干涉条纹移动量的判读,计算出镜片相对精密转轴的偏心量。
(四)透射式干涉测量法
透射式干涉测量是通过透镜的透射光发生干涉来测量中心偏差。其基本原理是测量被测镜片两个焦点连线,以此确定镜片的光轴,再对比参考轴与被测连线间的偏差,从而确定镜片的中心偏差。不过,这种方法存在局限性,无法测量被测镜片每一面的中心偏差以及反射元件。
透镜中心偏差的测量方法多样,各有特点与适用场景。反射式准直成像测量法以其结构简单、结果直观等优势,在实际应用中较为广泛。然而,在高精度测量需求以及特定光学元件检测场景下,其他方法如干涉测量法等也具有不可替代的作用。深入理解并合理选择这些测量方法,对于提高透镜制造精度、优化光学系统性能具有重要意义。
-
近轴光学:光学系统优化的基准与原点
当我们用严谨的光路追迹公式还原宽光束的真实传播路径,总会直面一个冰冷的现实:经过单个折射球面后,不同孔径角的光线无法汇聚于光轴的同一点。球差的存在,让完美成像成了现实里的难题。而近轴光学的诞生,恰似人类用数学为光学世界搭建起的一座理想国——它不直接解决现实的像差问题,却为所有光学设计指明了最终的航向,是整个光学系统优化不可或缺的基准与原点。
2026-07-02
-
光学图纸的语言进化:ISO 10110-6:2025新版标准与工程师日常
2025年5月,ISO 10110-6发布了第三版,距离上一版整整十年。这十年里,自由曲面从实验室走进产线,AR光波导从PPT变成产品——图纸上标注中心偏差的方式,也在悄悄变了。
2026-07-02
-

光学材料折射率精密测量:从V棱镜法到最小偏向角法的技术选择
折射率是光学设计的第一组输入参数——透镜的曲率半径、厚度、间隔,所有几何参数的计算都建立在准确的折射率数据之上。nd偏差0.001,经多片透镜累积放大后,系统焦点漂移可达数十微米。本文从工程选型角度,对比V棱镜法和最小偏向角法两种主流折射率测量方案的精度、适用条件和产线效率,帮助光学制造企业根据实际需求做出合理选择。
2026-07-01
-
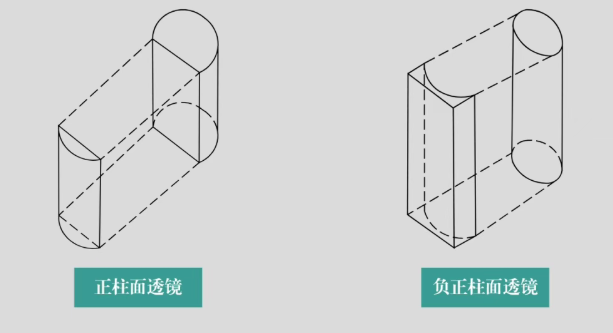
球柱面透镜全解析:从柱镜原理到等效球镜计算
配镜时我们常听到“散光要加柱镜”的说法,单纯的近视与远视依靠球面透镜即可矫正,而散光的矫正则离不开柱面透镜与球柱面透镜。验光单上的柱镜度数、轴位、等效球镜等关键参数,都源于这类透镜的光学特性。本文从基础原理出发,系统梳理柱面与球柱面透镜的核心知识。
2026-07-01
-

光学面形检测方法对比:干涉仪、轮廓仪、夏克哈特曼——如何选择?
面形精度是光学元件最重要的质量指标之一。在光学车间里,面形检测设备的选择直接影响加工效率和良率。干涉仪、轮廓仪、夏克-哈特曼波前传感器——三种主流方法各有精度边界和适用场景。本文从精度、速度、适用面形和成本四个维度系统对比,帮助光学制造企业做出合理选择。
2026-07-01







