
光学相控阵雷达工作原理
1.光学相控阵雷达是利用光学技术实现波束扫描和控制的雷达系统。虽然传统相控阵雷达主要基于微波技术,但光学相控阵雷达的工作原理与微波相控阵雷达本质上相似。两者都是通过调整每个阵元发出的信号的相对相位来合成并引导所需的辐射束方向。
2.光学相控阵通常采用多个激光器或光子集成电路元件作为发射单元,可以独立、快速地调整其发射光束的相位。当所有发射单元产生的光波在同一平面上相干叠加时,就可以根据需要形成灵活可指向的光束。该技术可实现快速光束扫描和精确目标定位,并具有高分辨率和多目标跟踪功能。

光学相控阵雷达具体工作流程如下:
1.光束生成:每个天线单元(即激光器)生成相干光束。
2.相位控制:通过精确的电子或光学手段控制各单元的发射相位,使各单元发射的光波的空间相位差满足特定要求。
3.干涉合成:调整后的光波在远场空间相互干涉,形成强度最大的位置,即合成光束的指向方向。通过改变各单元的相位关系,可以实现光束的快速扫描和定向扫描。
4.探测与测距:光学雷达发出的光束命中目标后被反射,接收器采集回波信号,根据飞行时间或相位差信息计算出目标的距离、速度等参数。
由于光学频率远高于微波,光学相控阵雷达理论上可以获得更高的角分辨率和更精确的测距结果,特别适合远距离探测、高精度成像等领域。然而,实现大规模光学相控阵雷达面临的技术挑战也更加复杂,包括光源稳定性、相位控制精度、大气传输效应等问题。
延伸阅读:
光学相控阵雷达具有以下特点:
1.高分辨率:由于光波的波长比微波小得多,在相同尺寸的天线下,光学雷达可以实现比微波雷达更高的分辨率,高角分辨率和距离分辨率为小目标或细节丰富的目标提供了更好的检测能力。
2.快速扫描和跟踪:光学相控阵可以利用电子控制快速改变每个发射单元的相位,实现快速波束指向和扫描,无需机械旋转部件,从而同时提供对多个目标的精确跟踪能力。
3.抗干扰性强:与微波频段相比,光学雷达工作在红外或可见光频段,受自然噪声和人为干扰的影响相对较小,有利于提高雷达的稳定性和信噪比系统。
4.隐蔽性好:由于许多现代隐身技术主要针对微波波段设计,而在红外或可见光波段的反射特性可能并不理想,因此光学雷达在某些情况下可以更好地探测和识别隐身目标。
5.集成度高、体积小:随着光纤激光器、光子集成电路等技术的发展,光学相控阵雷达的部件可以实现小型化、集成化,有利于减小系统的体积和重量。
6.技术挑战大:尽管优势明显,但构建高性能光学相控阵雷达在技术上也存在困难,包括光源稳定性、相位一致性控制、大气衰减和湍流效应等问题需要克服。
它具有广泛的潜在应用:可用于太空监视、弹道导弹预警、深空探测和先进战术防御系统等领域。
-

激光损伤阈值(LIDT)测试技术:ISO 21254标准解读与工程实践
高功率激光系统中的光学元件,承受着每平方厘米数焦耳至数千焦耳的能量密度。一片反射镜的膜层在若干次脉冲后出现针孔——系统功率被迫降级,甚至整机返修。激光诱导损伤阈值(LIDT)是决定光学元件"能承受多强的光而不坏"的核心参数。本文从损伤机理、ISO 21254标准测试方法和工程选型三个维度,系统介绍LIDT测试的技术体系。
2026-07-07
-

DUV vs EUV光刻物镜装调:两种技术路线的精度博弈
DUV 和 EUV,两代光刻技术的核心光学系统,分别在 193nm 和 13.5nm 波长下工作。它们的装调精度要求相差的不是百分比,而是数量级。更关键的是,它们的装调方法论本身就是两套完全不同的逻辑。
2026-07-07
-
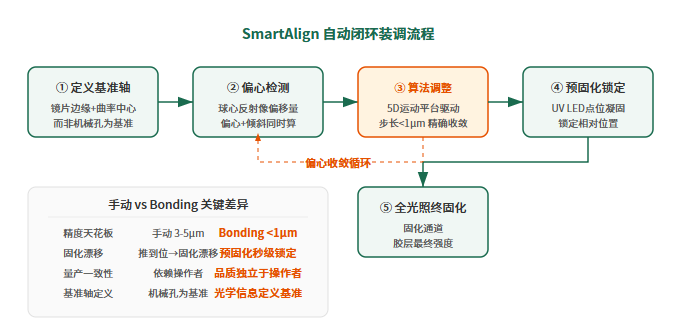
OptiCentric® Bonding 胶合装调系统,从"手感对准"到"算法锁定"
手动胶合时代,师傅的手感是精度上限——推到位靠经验,固化漂移靠运气,量产一致性靠祈祷。Bonding系统把这三件事交给算法:SmartAlign定义正确的轴、算法驱动精确的调整、梯度固化锁住精确的结果。
2026-07-07
-

精密光学检测实验室建设指南:从环境控制到设备布局的工程实践
一台精度λ/50的干涉仪放在一间没有温控的普通房间里,实测精度可能退化到λ/10以下。精密光学检测设备不是"买来就能用"的——它们的精度发挥严重依赖环境条件。本文从温度、湿度、振动、洁净度和设备布局五个维度,系统梳理精密光学检测实验室的建设要求和工程实践,为光学制造企业在规划检测实验室时提供可参考的技术框架。
2026-07-06
-

红外热像仪镜头选型指南:短焦、中焦与长焦的参数原理及场景适配
在红外热像仪的选型过程中,用户通常优先关注探测器分辨率参数,如384×288、640×512、1280×1024等指标。但在实际应用场景中,镜头焦距的适配性往往直接决定最终观测效果:同一台640×512分辨率的热像仪,搭配短焦镜头可实现大范围场景覆盖,但远距离小目标仅能占据少量像素;搭配长焦镜头可放大远处目标细节,但视场范围大幅收窄,搜索效率下降;中焦镜头虽兼顾二者特性,却未必适配所有特定场景。
2026-07-06







