
无透镜成像的算法体系、技术路线与发展演进
在计算成像与光电探测技术的融合发展中,无透镜成像凭借硬件架构极简、算法驱动成像、场景适配性强的核心优势,成为图像传感领域的重要研究方向。该技术摒弃传统光学透镜的光场调控方式,以光场传播的物理模型为基础,通过多样化的数学算法实现衍射信息的捕捉、重建与优化,历经数十年发展已形成完善的算法体系和多元技术路线。本文将从算法核心逻辑出发,按基础体系-核心算法-技术路线-发展趋势的逻辑脉络,系统解析无透镜成像的技术原理、性能特征与应用潜力,厘清其技术演进的核心规律。
一、无透镜成像的基础技术体系
无透镜成像的核心是以算法替代光学透镜的光场调控功能,其技术体系围绕成像模式和算法分类两大核心构建,二者相互匹配形成不同的技术实现路径,为后续各类核心算法的设计奠定基础。
1.主流成像模式:根据探测原理和应用场景,无透镜成像主要分为全息无透镜、荧光无透镜、投影式无透镜、ptycho无透镜四类,不同模式对应不同的光场采集方式,决定了算法设计的物理基础。
2.核心算法分类:按功能与求解逻辑,无透镜成像算法可分为三大类,一是光场重建/相位恢复类核心算法,如菲涅尔变换法、角谱法、GS迭代算法等,是实现从衍射强度图到物体真实图像还原的关键;二是图像质量优化类算法,如像素超分辨、上采样等,用于提升重建图像的分辨率和清晰度;三是辅助优化算法,如压缩感知、深度学习等,用于解决欠采样、低信噪比等问题。
整体而言,无透镜成像的算法设计均遵循物理模型-装置实现-数学求解的核心逻辑,通过对光场自由空间传播的数值模拟、迭代优化,弥补无透镜架构下的光场信息缺失,实现成像性能的突破,这也是所有核心算法的共同设计基础。
二、无透镜成像的六大核心算法:原理、特性与适用场景
无透镜成像的算法体系中,投影式算法、全息反向传播算法、GS迭代算法、融合型GS算法、傅立叶叠层衍射算法、近场盲叠层衍射算法构成六大核心技术路径。各类算法基于不同的物理模型和数学求解策略,在成像精度、计算效率、硬件要求、适用场景上各有侧重,形成互补的技术格局。
(一)投影式无透镜成像算法:直接映射,极简适配
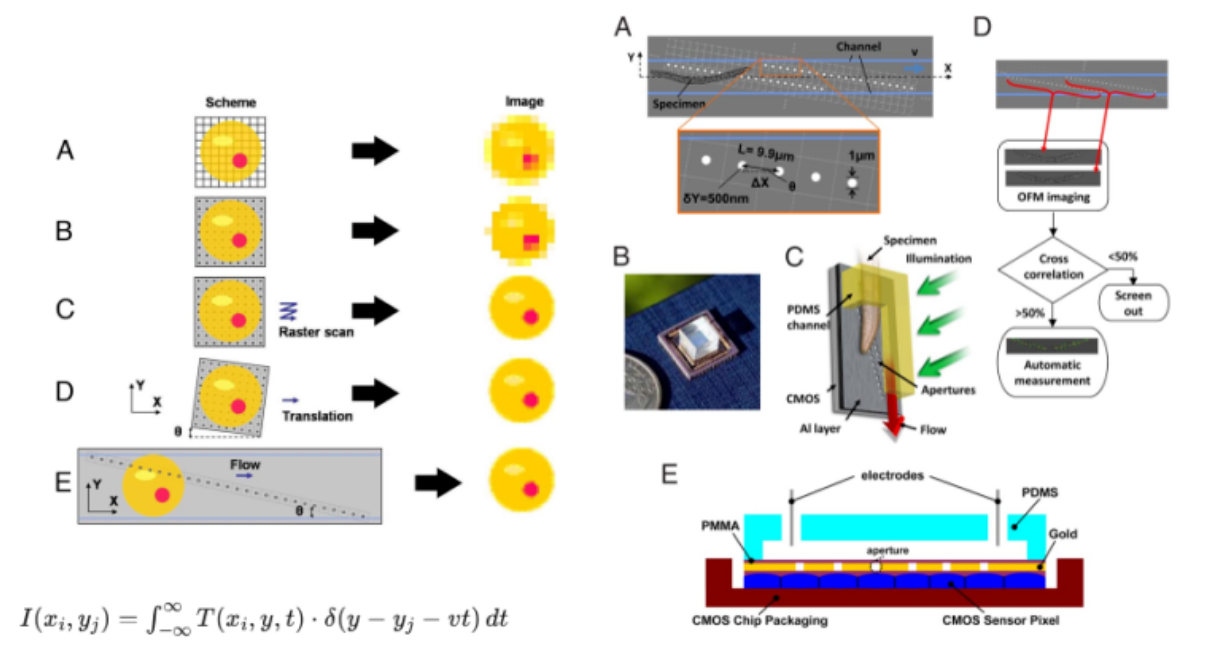
该算法是无透镜成像中最基础的实现方式,核心逻辑为近场直接投影+超分辨采样+上采样重建,物体需紧贴像感面以最大程度降低衍射效应,配合小于像感面像素的微孔mask扫描完成超分辨采样,重建过程本质是将多帧低分辨率采样图像融合为一帧高分辨率图像的上采样过程。
其显著优势是无需相干光源、不涉及相位信息,仅通过光强信号的直接映射实现成像,算法复杂度低、计算速度快;与微流控技术结合(OFM)时,可利用样品自然流动替代机械扫描,大幅降低系统复杂度。该算法的分辨率由编码微孔尺寸决定,主要适用于生物细胞、微纳颗粒的低成本、高通量观测场景。
(二)直接反向传播的全息算法:同轴全息为基,三种方法实现
该算法是无透镜全息成像的技术根基,核心逻辑基于傅里叶光学和标量衍射理论,将传感器采集的衍射强度图通过光场反向传播还原为物体真实图像,核心关键是传递函数的选取与数值实现。
其数值实现主要有三种方法,三者均为光场反向传播的不同数学表达,在计算效率、精度、适用场景上形成明确差异,也是该算法的核心技术分支:
1.菲涅尔变换法:基于惠更斯-菲涅尔原理的近似处理,仅需1次快速傅里叶变换,计算速度最快、内存需求最低,但受远场近似条件限制,近场成像精度低,且重建图像像素间距随传播距离变化,适用于传播距离较大的场景;
2.卷积法:将物面点源视为球面波叠加,通过3次傅里叶变换实现频域严格卷积,物理意义明确,易引入滤波器进行降噪和PSF定制设计,但计算量大、内存开销高,适用于需要滤波降噪、定制光场传播模型的场景;
3.角谱法:直接在频域求解波动方程,通过2次傅里叶变换完成计算,无近似引入、成像精度高,且输入输出网格一致、适配性强,仅在传播距离较大时存在相位因子波动导致的混叠问题,综合性价比最优,成为当前无透镜全息成像的主流方法,适用于近场光学成像、高精度定量相位恢复等严苛场景。
(三)GS迭代算法:相位恢复核心,双重约束迭代
针对无透镜全息成像中相位缺失、重建质量受限的核心瓶颈,GS迭代算法成为相位恢复的经典方法,核心逻辑是利用物面和像面的双重约束,在两个域之间交替投影迭代,逐步逼近光场真实复振幅分布。
该算法的实现分为四个核心步骤,形成闭环迭代过程:1.反向传播,将像感面复振幅通过角谱法等传播回物面;2.物面约束更新,根据样品特性施加支撑域、非负性、纯相位等先验约束,缩小解空间;3.正向传播,将更新后的物面光场传播至像感面,得到估算复振幅;4.像面振幅替换,保留估算相位,将振幅替换为传感器实测强度值的平方根,实现实验数据与理论模型的耦合。
其中,物面约束的设计与组合是算法性能的关键,合理利用先验知识可有效抑制噪声、加速收敛,也是后续融合型GS算法的优化基础。
(四)融合型GS算法:TIE/多波长/多距离赋能,突破单一场景局限
为解决传统GS算法收敛慢、单波长/单距离成像存在孪生像干扰的问题,通过引入外部相位信息或扩展物理参数维度,形成TIE+GS、多波长+GS、多距离+GS三类融合型算法,核心逻辑是为迭代过程增加额外约束,将欠定的相位恢复问题转化为超定/适定问题。
1.TIE+GS:利用强度传输方程(TIE)快速获取物面低频相位分布,作为GS迭代的初始值,大幅缩短收敛路径,提升成像效率;
2.多波长+GS:利用不同波长照明下衍射图样的波长依赖性,在同一距离记录多幅全息图,迭代中在各波长测量平面与物面间交替传播,逼近与所有测量自洽的解;
3.多距离+GS:采用单一波长照明,在多个光轴距离记录衍射图,利用不同距离携带的不同空间频率信息,融合多组物面估计完成更新,有效抑制孪生像、扩展成像景深。
三类融合算法均保留GS迭代的核心逻辑,通过外部赋能突破传统算法的性能边界,适用于复杂样品、高分辨率要求的无透镜成像场景。
(五)傅立叶叠层衍射成像算法:掩膜编码+无机械扫描,高分辨率大视场
该算法的核心逻辑是结构化照明+三平面架构+叠层迭代,采用LED阵列实现无机械扫描的结构化照明平移,将物体置于编码掩膜-物体面-图像传感器之间形成三平面架构,把编码掩膜的已知随机图案作为硬约束纳入重建算法。
通过角谱传递函数描述三平面间的级联衍射传播,结合正则化叠层迭代引擎(rPIE)与倒空间上采样技术,有效压缩解空间维度,提升迭代收敛速度和重建鲁棒性,最终在无需机械扫描的前提下,实现亚像素分辨率与大视场的统一,适用于对分辨率和视场均有高要求的无透镜成像场景。
(六)近场盲叠层衍射成像算法:盲解算+低硬件要求,性能平衡最优
该算法是叠层成像的创新变形,核心逻辑是近场散斑记录+盲解算迭代+平移多样性,兼具“无机械扫描”和“低硬件成本”的双重优势。
其核心创新点有三:1.采用随机非周期散射体作为编码层,紧贴物体与传感器布置,最大化获取高菲涅尔数的近场高频信息,提升成像分辨率;2.实现“盲解算”,通过多帧迭代传播同时恢复物体轮廓和散射体轮廓,无需提前获知编码层信息;3.多帧之间的平移关系由图像相关性计算获得,而非依赖高精度压电位移台,大幅降低对硬件的精度要求。
该算法在分辨率、大视场、无机械扫描三者间实现了最优性能平衡,是目前无透镜成像领域最具发展潜力的算法,核心挑战在于超高菲涅尔数下的工程化配置。
三、无透镜成像的主流技术路线对比:核心特征与优劣分析
基于六大核心算法的技术延伸,无透镜成像形成了直接阴影成像、数字同轴全息、多高度/多波长相位恢复、多角度LED照明、近场盲叠层衍射成像五大主流技术路线。各路线以不同算法为核心,结合对应的硬件配置和光源要求,在成像性能、适用场景、硬件成本上形成明确差异,具体对比如下:
| 技术路线 | 核心原理 | 光源要求 | 核心优势 | 主要问题 | 适用场景 |
|---|---|---|---|---|---|
| 直接阴影成像 | 近场投影 + 几何光学,投影式算法核心 | 非相干光(LED) | 算法简单、实时性强、所见即所得 | 分辨率受像素 /mask 孔径限制,对物像距离要求高 | 低成本、高通量的微纳颗粒 / 细胞初筛 |
| 数字同轴全息 | 干涉记录 + 数值重建,全息反向传播算法核心 | 相干光(激光)/ 部分相干光 | 单帧捕获、时间分辨率高、算法简单 | 孪生像干扰,仅适用于弱散射、稀疏样品 | 高速动态的稀疏样品观测 |
| 多高度 / 多波长相位恢复 | 轴向 / 色散多样性 + 融合型 GS 算法 | 相干光(激光)/ 部分相干光 | 成像分辨率、质量优于单帧全息 | 多高度需高精度机械扫描,多波长存在色散耦合 | 复杂样品的高分辨率相位成像 |
| 多角度 LED 照明 | 角度多样性 + 合成孔径,LED 阵列结构化照明 | 可编程 LED 阵列 | 分辨率高、无机械扫描 | 系统复杂度高,对角度标定偏差敏感 | 大视场、高分辨率的静态样品成像 |
| 近场盲叠层衍射成像 | 散射体调制 + 平移多样性 + 盲叠层迭代 | 相干光(激光)/ 部分相干光 | 分辨率、视场、无扫描的性能平衡,硬件成本低 | 对散射面 / 物面 / 像面间距要求高,工程化配置难 | 便携式、高分辨率的生物医学检测 |
整体来看,各技术路线无绝对优劣,均为“算法-硬件-场景”的匹配结果:直接阴影成像、数字同轴全息适配低成本、快节奏的基础观测;多高度/多波长相位恢复、多角度LED照明适配高分辨率的复杂样品观测;近场盲叠层衍射成像则兼顾性能与实用性,成为跨场景应用的最优选择。
四、无透镜成像的技术演进趋势与应用潜力
无透镜成像的发展本质是硬件极简化与算法增强化的双向协同,其核心演进路径清晰且明确,同时凭借技术特性在多个领域展现出变革性的应用潜力,成为未来光电成像领域的重要发展方向。
(一)核心演进趋势:硬件极简—算法增强—智能融合
1.硬件极简化:持续摒弃复杂光学元件,推动成像系统的微型化、便携化、低成本化,从“少透镜”向“无透镜”彻底转型,适配便携式、现场检测的场景需求;
2.算法增强化:以物理模型为基础,持续优化迭代算法的收敛速度、成像精度,突破硬件简化带来的性能边界,实现“以算法补硬件”的核心目标;
3.智能融合化:未来将深度融合深度学习、人工智能技术,实现算法的自适应优化与主动感知,从传统的“被动光场重建”向“主动光场调控与智能解析”升级,解决复杂场景下的低信噪比、欠采样等难题。
当前,无透镜成像的核心研究难点集中在近场盲叠层衍射成像的超高菲涅尔数工程化配置、迭代算法的实时性优化、多算法融合的自适应设计三大方面,也是后续技术突破的关键方向。
(二)核心应用潜力:聚焦便携、高通量、现场检测
无透镜成像凭借硬件简单、便携性强、成本低、成像性能优异的技术特性,在生物医学检测、便携式诊断、微纳制造检测、环境监测等领域展现出巨大应用潜力,核心应用场景包括:
1.生物医学领域:与微流控芯片结合,实现单细胞、微生物、线虫等样品的高通量、无标记实时观测,为细胞研究、精准医疗提供低成本成像方案;
2.便携式诊断领域:构建微型化无透镜成像系统,实现病原体、生物标志物的现场快速检测,突破传统成像设备体积大、依赖专业操作的局限;
3.微纳制造领域:实现微纳结构的高精度、快速检测,适配工业生产的高通量、高效率需求,降低检测成本;
4.环境监测领域:构建便携式检测设备,实现水体、大气中微纳颗粒、污染物的现场快速成像与分析,提升环境监测的时效性。
无透镜成像作为计算成像领域的核心技术,以算法驱动为核心特征,构建了从基础成像模式到六大核心算法、再到五大主流技术路线的完整技术体系。各类算法与技术路线相互补充、各有侧重,形成了“按需选择、场景适配”的技术格局,而近场盲叠层衍射成像则成为兼顾性能与实用性的最优技术方向。
从发展趋势来看,无透镜成像正沿着“硬件极简—算法增强—智能融合”的路径持续演进,其核心价值在于打破了传统成像技术对光学透镜的依赖,实现了成像系统的便携化、低成本化与高性能化的统一。随着计算光学、人工智能、微纳制造技术的不断融合,无透镜成像将进一步突破性能边界,解决工程化配置、算法实时性等核心问题,最终在生物医学、便携式诊断、工业检测等领域实现规模化应用,成为未来光电成像领域的重要变革性技术。
-
TriAngle 自准直仪:一台把角度变成像素位移的"光学量角器"
在光学计量这条产品线上,TriAngle 自准直仪不像 MTF 仪或干涉仪那样自带主角光环,但它几乎出现在所有需要"对准"和"校角"的现场:从光学元件的楔角、棱镜的 90° 角,到机床导轨的直线度、半导体光刻机的光轴倾斜,再到航天载荷的真空对准。它是一台把角度翻译成像素位移的精密仪器。
2026-07-20
-
自由曲面面形评价:从常规非球面到自由曲面的检测方法演进
常规非球面的面形检测已有成熟的Null透镜和CGH补偿方案。但当非球面失去了旋转对称性——变成自由曲面(Freeform)时,传统的旋转对称补偿方案不再适用。自由曲面的面形检测是光学测量领域中正在快速发展的前沿技术——它从补偿检测的框架出发,但需要一套新的"语言"(描述符)和"工具"(多自由度扫描或计算成像方法)。本文从面形描述、检测方法和精度评估三个维度,介绍自由曲面面形检测的技术现状和发展方向。
2026-07-20
-

干涉条纹怎么判读——拿到干涉图先看什么、再看什么
一张干涉图拿到手,先看什么?
多数工程师拿到干涉图的第一反应是:PV多少?RMS多少?合格不合格?
但这两个数字回答的是"好不好",不是"为什么好/不好"。你真正需要的不是一张成绩单,是一张体检报告——每条纹的弯曲方向、间距变化、对称性,藏着比PV更关键的信息。2026-07-17
-

光学检测设备选型总览:不同规模光学工厂的配置思路
一家初创光学工坊可能只需要一台球径仪和一台定心仪,而一家年产千万片镜头的工厂需要覆盖从原材料检测到成品MTF的全自动检测线。光学检测设备的选型不是"买最贵的"或者"买最便宜的",而是根据产品精度、产量规模和成本预算在三者之间找到最优平衡点。本文从入门级、产线级、研发级和计量级四个层次,为不同规模的光学制造企业提供检测设备的选型参考。
2026-07-16
-
偏振光学元件的检测:消光比、偏振度与相位延迟的测量原理
在激光通信、量子光学和偏振成像系统中,偏振光学元件的品质往往以"消光比"来评价——一个消光比为10⁶:1(60dB)的偏振分光器,意味着p偏振光可以"几乎完美地透过",而s偏振光被"几乎完全抑制"。但当这个分光器在系统中因为微小的装调偏差退化到10³:1时,系统性能的劣化可能比MTF下降10%更严重。本文从消光比、偏振度和相位延迟(波片检测)三个核心参数出发,系统介绍偏振光学元件的检测方法。
2026-07-16







